

Public Member Functions | |
| P2OS (ConfigFile *cf, int section) | |
| virtual int | Subscribe (player_devaddr_t id) |
| Subscribe to this driver. More... | |
| virtual int | Unsubscribe (player_devaddr_t id) |
| Unsubscribe from this driver. More... | |
| virtual void | Main () |
| Main method for driver thread. More... | |
| virtual int | MainSetup () |
| Sets up the resources needed by the driver thread. | |
| virtual void | MainQuit () |
| Cleanup method for driver thread (called when main exits) More... | |
| virtual int | ProcessMessage (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Message handler. More... | |
| void | CMUcamReset (bool doLock=true) |
| void | CMUcamTrack (int rmin=0, int rmax=0, int gmin=0, int gmax=0, int bmin=0, int bmax=0) |
| void | CMUcamStartTracking (bool doLock=true) |
| void | CMUcamStopTracking (bool doLock=true) |
 Public Member Functions inherited from ThreadedDriver Public Member Functions inherited from ThreadedDriver | |
| ThreadedDriver (ConfigFile *cf, int section, bool overwrite_cmds, size_t queue_maxlen, int interface_) | |
| Constructor with implicit interface. More... | |
| ThreadedDriver (ConfigFile *cf, int section, bool overwrite_cmds=true, size_t queue_maxlen=PLAYER_MSGQUEUE_DEFAULT_MAXLEN) | |
| Constructor for multiple-interface drivers. More... | |
| virtual | ~ThreadedDriver () |
| Destructor. | |
| virtual int | Setup () |
| Initialize the driver. More... | |
| virtual int | Shutdown () |
| Finalize the driver. More... | |
| virtual int | Terminate () |
| Terminate the driver. More... | |
| bool | Wait (double TimeOut=0.0) |
| Wait for new data to arrive on the driver's queue. More... | |
| virtual void | Update () |
| Update non-threaded drivers. More... | |
| Public Member Functions inherited from Driver | |
| bool | HasSubscriptions () |
| virtual void | Publish (player_devaddr_t addr, QueuePointer &queue, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_devaddr_t addr, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (QueuePointer &queue, player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds, size_t queue_maxlen, int interf) | |
| Constructor for single-interface drivers. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds=true, size_t queue_maxlen=PLAYER_MSGQUEUE_DEFAULT_MAXLEN) | |
| Constructor for multiple-interface drivers. More... | |
| virtual | ~Driver () |
| Destructor. | |
| int | GetError () |
| Get last error value. More... | |
| virtual int | Subscribe (QueuePointer &, player_devaddr_t) |
| Subscribe to this driver. More... | |
| virtual int | Unsubscribe (QueuePointer &, player_devaddr_t) |
| Unsubscribe from this driver. More... | |
| void | ProcessMessages (int maxmsgs) |
| Process pending messages. More... | |
| void | ProcessMessages (void) |
| Process pending messages. More... | |
| virtual int | ProcessInternalMessages (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Internal message handler. More... | |
| virtual bool | RegisterProperty (const char *key, Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
| virtual bool | RegisterProperty (Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
Private Member Functions | |
| int | SendReceive (P2OSPacket *pkt, bool publish_data=true) |
| void | ResetRawPositions () |
| void | ToggleSonarPower (unsigned char val) |
| void | ToggleMotorPower (unsigned char val) |
| int | HandleConfig (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| int | HandleCommand (player_msghdr *hdr, void *data) |
| void | StandardSIPPutData (double timestampStandardSIP) |
| void | GyroPutData (double timestampGyro) |
| void | BlobfinderPutData (double timestampSERAUX) |
| void | ActarrayPutData (double timestampArm) |
| void | HandlePositionCommand (player_position2d_cmd_vel_t position_cmd) |
| int | HandleGripperCommand (player_msghdr *hdr, void *data) |
| int | HandleLiftCommand (player_msghdr *hdr, void *data) |
| int | HandleArmGripperCommand (player_msghdr *hdr, void *data) |
| void | HandleAudioCommand (player_audio_sample_item_t audio_cmd) |
| void | get_ptz_packet (int s1, int s2=0) |
| int | SetupPtz () |
| void | OpenGripper (void) |
| void | CloseGripper (void) |
| void | StopGripper (void) |
| void | OpenArmGripper (void) |
| void | CloseArmGripper (void) |
| void | StopArmGripper (void) |
| double | TicksToDegrees (int joint, unsigned char ticks) |
| unsigned char | DegreesToTicks (int joint, double degrees) |
| double | TicksToRadians (int joint, unsigned char ticks) |
| unsigned char | RadiansToTicks (int joint, double rads) |
| double | RadsPerSectoSecsPerTick (int joint, double speed) |
| double | SecsPerTicktoRadsPerSec (int joint, double secs) |
| void | ToggleActArrayPower (unsigned char val, bool lock=true) |
| void | SetActArrayJointSpeed (int joint, double speed) |
| void | HandleActArrayPosCmd (player_actarray_position_cmd_t cmd) |
| void | HandleActArrayHomeCmd (player_actarray_home_cmd_t cmd) |
| int | HandleActArrayCommand (player_msghdr *hdr, void *data) |
| void | HandleLimbHomeCmd (void) |
| void | HandleLimbStopCmd (void) |
| void | HandleLimbSetPoseCmd (player_limb_setpose_cmd_t cmd) |
| void | HandleLimbSetPositionCmd (player_limb_setposition_cmd_t cmd) |
| void | HandleLimbVecMoveCmd (player_limb_vecmove_cmd_t cmd) |
| int | HandleLimbCommand (player_msghdr *hdr, void *data) |
| int | SendCommand (unsigned char *str, int len) |
| int | SendRequest (unsigned char *str, int len, unsigned char *reply, uint8_t camera=1) |
| void | PrintPacket (char *str, unsigned char *cmd, int len) |
| int | SendAbsPanTilt (int pan, int tilt) |
| int | setDefaultTiltRange () |
| int | GetAbsPanTilt (int *pan, int *tilt) |
| int | GetAbsZoom (int *zoom) |
| int | SendAbsZoom (int zoom) |
| int | read_ptz (unsigned char *reply, int size) |
| int | ReceiveCommandAnswer (int asize) |
| int | ReceiveRequestAnswer (unsigned char *data, int s1, int s2) |
| int | setControlMode () |
| int | setNotifyCommand () |
| int | setPower (int on) |
| int | setOnScreenOff () |
| int | CheckHostControlMode () |
| int | sendInit () |
| int | GetMaxZoom (int *maxzoom) |
| void | SendPulse (void) |
Private Attributes | |
| player_p2os_data_t | p2os_data |
| player_devaddr_t | position_id |
| player_devaddr_t | sonar_id |
| player_devaddr_t | aio_id |
| player_devaddr_t | dio_id |
| player_devaddr_t | gripper_id |
| player_devaddr_t | lift_id |
| player_devaddr_t | bumper_id |
| player_devaddr_t | power_id |
| player_devaddr_t | compass_id |
| player_devaddr_t | gyro_id |
| player_devaddr_t | blobfinder_id |
| player_devaddr_t | audio_id |
| player_devaddr_t | actarray_id |
| player_devaddr_t | limb_id |
| player_devaddr_t | ptz_id |
| player_devaddr_t | armgripper_id |
| bool | sentGripperCmd |
| uint8_t | lastGripperCmd |
| uint8_t | lastLiftCmd |
| player_actarray_position_cmd_t | lastLiftPosCmd |
| bool | sentArmGripperCmd |
| uint8_t | lastArmGripperCmd |
| uint8_t | lastActArrayCmd |
| player_actarray_position_cmd_t | lastActArrayPosCmd |
| player_actarray_home_cmd_t | lastActArrayHomeCmd |
| bool | sent_audio_cmd |
| player_audio_sample_item_t | last_audio_cmd |
| int | rot_kp |
| int | rot_kv |
| int | rot_ki |
| int | trans_kp |
| int | trans_kv |
| int | trans_ki |
| int | position_subscriptions |
| int | sonar_subscriptions |
| int | actarray_subscriptions |
| int | ptz_subscriptions |
| SIP * | sippacket |
| player_pose3d_t | gripperPose |
| player_bbox3d_t | gripperOuterSize |
| player_bbox3d_t | gripperInnerSize |
| player_bbox3d_t | armGripperOuterSize |
| player_bbox3d_t | armGripperInnerSize |
| double | aaLengths [6] |
| double | aaOrients [18] |
| double | aaAxes [18] |
| player_point_3d_t | aaBasePos |
| player_orientation_3d_t | aaBaseOrient |
| KineCalc * | kineCalc |
| float | armOffsetX |
| float | armOffsetY |
| float | armOffsetZ |
| player_limb_data_t | limb_data |
| int | param_idx |
| int | direct_wheel_vel_control |
| int | psos_fd |
| const char * | psos_serial_port |
| bool | psos_use_tcp |
| const char * | psos_tcp_host |
| int | psos_tcp_port |
| struct timeval | lastblob_tv |
| int | motor_max_speed |
| int | motor_max_turnspeed |
| bool | use_vel_band |
| short | motor_max_trans_accel |
| short | motor_max_trans_decel |
| short | motor_max_rot_accel |
| short | motor_max_rot_decel |
| int | radio_modemp |
| int | joystickp |
| int | bumpstall |
| bool | ignore_checksum |
| player_ptz_data_t | ptz_data |
| int | maxfov |
| int | minfov |
| int | maxzoom |
| int | pandemand |
| int | tiltdemand |
| int | zoomdemand |
| circbuf | cb |
| float | pulse |
| double | lastPulseTime |
Additional Inherited Members | |
| Public Attributes inherited from Driver | |
| QueuePointer | ret_queue |
| Last requester's queue. More... | |
| player_devaddr_t | device_addr |
| Default device address (single-interface drivers) | |
| int | entries |
| Total number of entries in the device table using this driver. More... | |
| bool | alwayson |
| Always on flag. More... | |
| QueuePointer | InQueue |
| Queue for all incoming messages for this driver. | |
| Protected Member Functions inherited from ThreadedDriver | |
| virtual void | StartThread (void) |
| virtual void | StopThread (void) |
| Cancel (and wait for termination) of the driver thread. More... | |
| void | TestCancel () |
| enable thread cancellation and test for cancellation More... | |
| Protected Member Functions inherited from Driver | |
| int | AddInterface (player_devaddr_t addr) |
| Add an interface. More... | |
| int | AddInterface (player_devaddr_t *addr, ConfigFile *cf, int section, int code, const char *key=NULL) |
| Add an interface. More... | |
| void | SetError (int code) |
| Set/reset error code. | |
| int | AddFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Wake up the driver if the specified event occurs on the file descriptor. | |
| int | RemoveFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Remove a previously added watch, call with the same arguments as when adding the watch. | |
| virtual void | Lock (void) |
| Lock access between the server and driver threads. More... | |
| virtual void | Unlock (void) |
| Unlock access to driver internals. More... | |
| virtual void | SubscriptionLock (void) |
| Lock to protect the subscription count for the driver. | |
| virtual void | SubscriptionUnlock (void) |
| Unlock to protect the subscription count for the driver. More... | |
| Static Protected Member Functions inherited from ThreadedDriver | |
| static void * | DummyMain (void *driver) |
| Dummy main (just calls real main). More... | |
| static void | DummyMainQuit (void *driver) |
| Dummy main cleanup (just calls real main cleanup). More... | |
Member Function Documentation
◆ Main()
|
virtual |
Main method for driver thread.
drivers have their own thread of execution, created using StartThread(); this is the entry point for the driver thread, and must be overloaded by all threaded drivers.
Implements ThreadedDriver.
References PlayerCc::min(), PLAYER_LIMB_STATE_COLL, PLAYER_LIMB_STATE_IDLE, PLAYER_LIMB_STATE_MOVING, and PLAYER_LIMB_STATE_OOR.

◆ MainQuit()
|
virtual |
Cleanup method for driver thread (called when main exits)
Overload this method and to do additional cleanup when the driver thread exits.
Reimplemented from ThreadedDriver.
◆ ProcessMessage()
|
virtual |
Message handler.
This function is called once for each message in the incoming queue. Reimplement it to provide message handling. Return 0 if you handled the message and -1 otherwise
- Parameters
-
resp_queue The queue to which any response should go. hdr The message header data The message body
Reimplemented from Driver.
References player_actarray_geom::actuators, player_actarray_geom::actuators_count, player_limb_setpose_cmd::approach, player_blobfinder_imager_config::autogain, player_actarray_actuatorgeom::axis, player_actarray_geom::base_orientation, player_actarray_geom::base_pos, player_limb_geom_req::basePos, player_blobfinder_color_config::bmax, player_blobfinder_color_config::bmin, player_blobfinder_imager_config::brightness, player_bumper_geom::bumper_def, player_bumper_geom::bumper_def_count, player_gripper_geom::capacity, player_actarray_actuatorgeom::centre, player_blobfinder_imager_config::colormode, player_ptz_req_generic::config, player_ptz_req_generic::config_count, player_actarray_actuatorgeom::config_speed, player_blobfinder_imager_config::contrast, player_limb_vecmove_cmd::direction, player_blobfinder_color_config::gmax, player_blobfinder_color_config::gmin, player_actarray_actuatorgeom::hasbrakes, player_actarray_actuatorgeom::home, player_audio_sample_item::index, player_gripper_geom::inner_size, player_actarray_position_cmd::joint, player_actarray_home_cmd::joint, player_bumper_define::length, player_actarray_actuatorgeom::length, player_limb_vecmove_cmd::length, Message::MatchMessage(), player_actarray_actuatorgeom::max, player_actarray_actuatorgeom::min, player_gripper_geom::num_beams, player_actarray_actuatorgeom::orientation, player_limb_setpose_cmd::orientation, player_gripper_geom::outer_size, player_pose2d::pa, PLAYER_ACTARRAY_CMD_HOME, PLAYER_ACTARRAY_CMD_MULTI_POS, PLAYER_ACTARRAY_CMD_POS, PLAYER_ACTARRAY_REQ_GET_GEOM, PLAYER_ACTARRAY_REQ_POWER, PLAYER_ACTARRAY_REQ_SPEED, PLAYER_ACTARRAY_TYPE_LINEAR, PLAYER_ACTARRAY_TYPE_ROTARY, PLAYER_AUDIO_CMD_SAMPLE_PLAY, PLAYER_BLOBFINDER_REQ_SET_COLOR, PLAYER_BLOBFINDER_REQ_SET_IMAGER_PARAMS, PLAYER_BUMPER_REQ_GET_GEOM, PLAYER_CAPABILITIES_REQ, PLAYER_ERROR, PLAYER_GRIPPER_CMD_CLOSE, PLAYER_GRIPPER_CMD_OPEN, PLAYER_GRIPPER_CMD_STOP, PLAYER_GRIPPER_REQ_GET_GEOM, PLAYER_LIMB_CMD_HOME, PLAYER_LIMB_CMD_SETPOSE, PLAYER_LIMB_CMD_STOP, PLAYER_LIMB_REQ_BRAKES, PLAYER_LIMB_REQ_GEOM, PLAYER_LIMB_REQ_POWER, PLAYER_LIMB_REQ_SPEED, PLAYER_LIMB_STATE_MOVING, PLAYER_LIMB_STATE_OOR, PLAYER_MSGTYPE_CMD, PLAYER_MSGTYPE_REQ, PLAYER_MSGTYPE_RESP_ACK, PLAYER_MSGTYPE_RESP_NACK, PLAYER_POSITION2D_CMD_VEL, PLAYER_POSITION2D_REQ_GET_GEOM, PLAYER_POSITION2D_REQ_MOTOR_POWER, PLAYER_POSITION2D_REQ_RESET_ODOM, PLAYER_POSITION2D_REQ_SET_ODOM, PLAYER_POSITION2D_REQ_VELOCITY_MODE, PLAYER_PTZ_REQ_GENERIC, PLAYER_SONAR_REQ_GET_GEOM, PLAYER_SONAR_REQ_POWER, PLAYER_WARN, player_gripper_geom::pose, player_position2d_geom::pose, player_position2d_set_odom_req::pose, player_bumper_define::pose, player_sonar_geom::poses, player_sonar_geom::poses_count, player_actarray_position_cmd::position, player_limb_setpose_cmd::position, player_limb_setposition_cmd::position, player_actarray_multi_position_cmd::positions, player_actarray_multi_position_cmd::positions_count, player_orientation_3d::ppitch, player_orientation_3d::proll, player_point_3d::px, player_pose2d::px, player_pose3d::px, player_point_3d::py, player_pose2d::py, player_pose3d::py, player_orientation_3d::pyaw, player_pose3d::pyaw, player_point_3d::pz, player_bumper_define::radius, player_blobfinder_color_config::rmax, player_blobfinder_color_config::rmin, player_msghdr::size, player_position2d_geom::size, player_bbox3d::sl, player_position2d_power_config::state, player_sonar_power_config::state, player_msghdr::subtype, player_bbox3d::sw, player_msghdr::type, player_actarray_actuatorgeom::type, player_position2d_velocity_mode_config::value, and player_position2d_cmd_vel::vel.

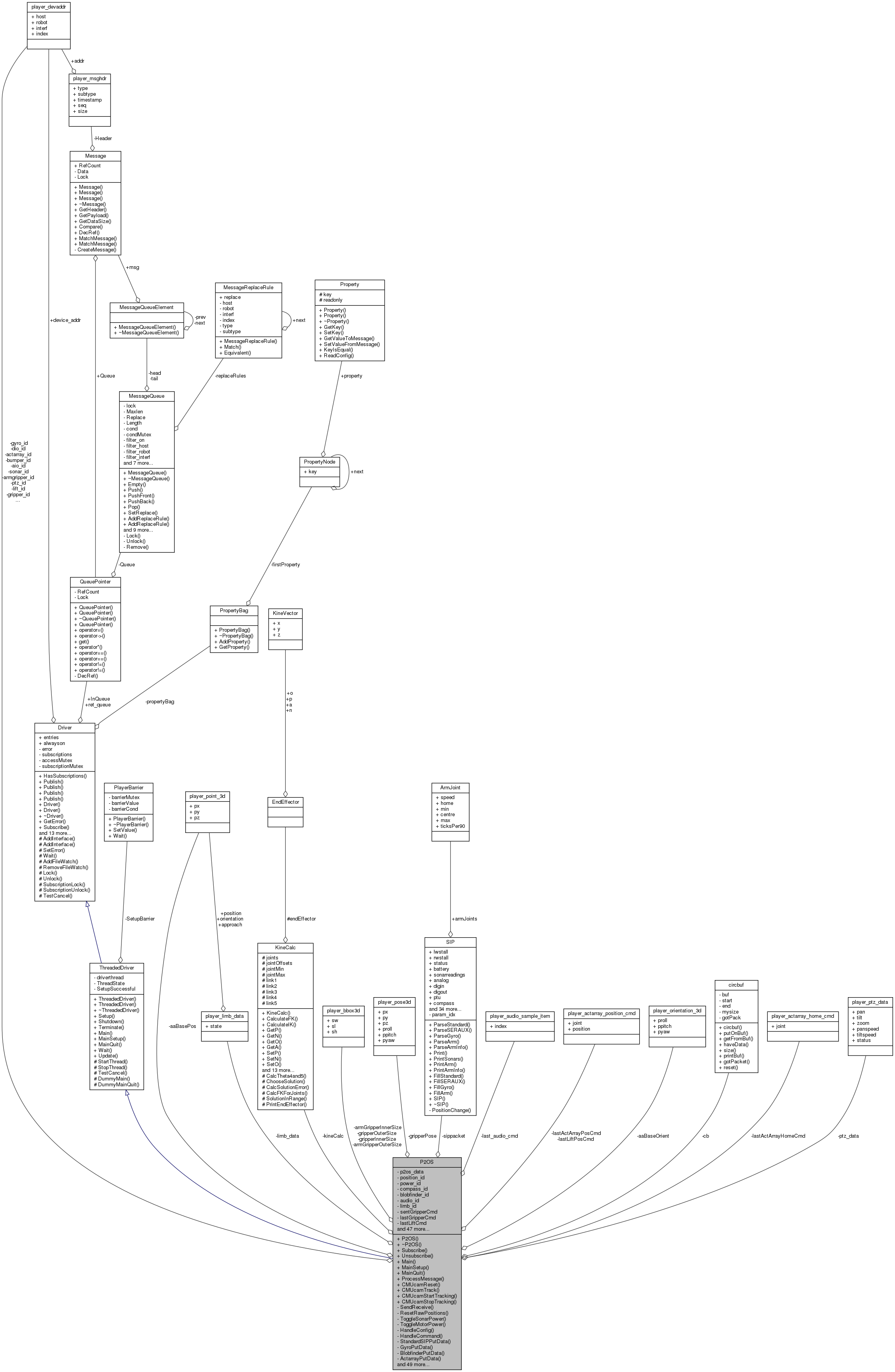
◆ Subscribe()
|
virtual |
Subscribe to this driver.
The Subscribe() and Unsubscribe() methods are used to control subscriptions to the driver; a driver MAY override them, but usually won't.
- Parameters
-
addr Address of the device to subscribe to (the driver may have more than one interface).
- Returns
- Returns 0 on success.
Reimplemented from Driver.
References Device::MatchDeviceAddress(), and Driver::Subscribe().
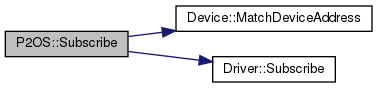
◆ Unsubscribe()
|
virtual |
Unsubscribe from this driver.
The Subscribe() and Unsubscribe() methods are used to control subscriptions to the driver; a driver MAY override them, but usually won't.
- Parameters
-
addr Address of the device to unsubscribe from (the driver may have more than one interface).
- Returns
- Returns 0 on success.
Reimplemented from Driver.
References Device::MatchDeviceAddress(), PLAYER_ACTARRAY_DATA_STATE, PLAYER_AIO_DATA_STATE, PLAYER_BLOBFINDER_DATA_BLOBS, PLAYER_BUMPER_DATA_STATE, PLAYER_DIO_DATA_VALUES, PLAYER_GRIPPER_DATA_STATE, PLAYER_LIMB_DATA_STATE, PLAYER_MSGTYPE_DATA, PLAYER_POSITION2D_DATA_STATE, PLAYER_POWER_DATA_STATE, PLAYER_PTZ_DATA_STATE, PLAYER_SONAR_DATA_RANGES, and Driver::Unsubscribe().
The documentation for this class was generated from the following files:
- p2os.h
- p2os.cc
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13