
Base class for drivers which oeprate with a thread. More...
#include <driver.h>
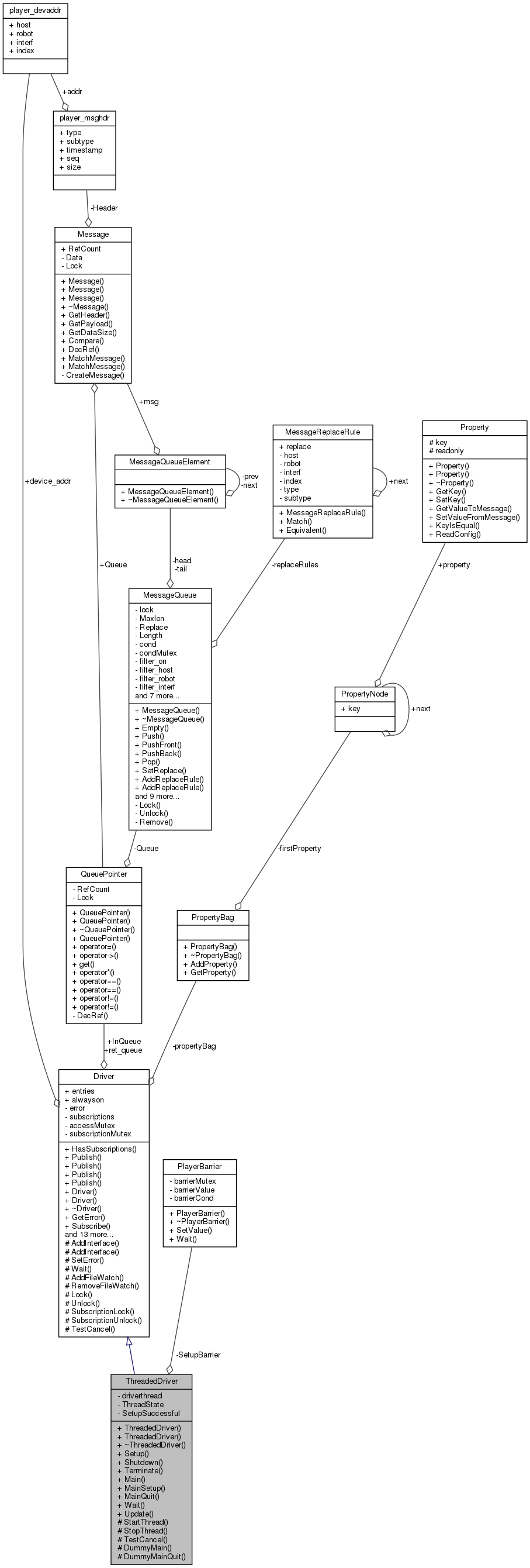
Inherits Driver.
Inherited by Accel_Calib, Acr120u, Acts, AdaptiveMCL, AioToSonar, Alsa, AmtecM5, AmtecPowerCube, Bumper2Laser, Camera1394, CameraCompress, Camerareq, CameraUncompress, CameraUvc, CameraV4L, CameraV4L2, CamFilter, canonvcc4, ClodBuster, Cmucam2, CMVisionBF, Create, CvCam, DeadStop, Differential, DioCmd, DioDelay, Dummy, EEDHController, Ekfvloc, EpuckDriver, ER, FakeLocalize, Festival, Flexiport, FlockOfBirds_Device, GarciaDriver, GarminNMEA, GbxGarminAcfr, GbxSickAcfr, GenericXBow, gridmap, GripCmd, GStreamerDriver, Hemisson, HokuyoDriver, ImageBase, ImageSeq, ImgCmp, ImgSave, InertiaCube2, InsideM300, Iwspy, KartoLogger, Khepera, KinectDriver, LaserFeature, Libv4l2, LinuxJoystick, mbicp, Mica2, MicroStrain3DMG, MotionMind, MrIcp, ND, NomadDriver, Nxt, Obot, OceanServer, OpaqueCmd, P2OS, PBSDriver, PhidgetAcc, PhidgetIFK, Phidgetrfid, PlayerNIMU, PortIO, Powershot, PTU46_Device, RazorIMU, RCore_XBridge, ReadLog, REB, RFLEX, roboteq, RobotinoDriver, Roomba, RS4LeuzeLaserDriver, rt3xxx, Searchpattern, SegwayRMP, SegwayRMP400, SerialStream, SerIO, sickLDMRS, SickLMS200, SickLMS400, SickNAV200, SickRFI341, SickS3000, SkyetekM1, snd, SonyEVID30, SpeechCmd, SphereDriver, SpherePTZ, Sphinx2, SR3000, SrvAdv_MDNS, StatGrabDriver, STOC, SWISSRANGER, TCPStream, UniCap_Image, Vec2Map, VelCmd, VFH_Class, VideoCanny, Wavefront, wbr914, WlanScan, WriteLog, XSensMT, and Yarp_Image.
Detailed Description
Base class for drivers which oeprate with a thread.
This class manages driver subscriptions, threads, and data marshalling to/from device interfaces. All drivers inherit from this class, and most will overload the MainSetup(), MainQuit() and Main() methods.
The ThreadedDriver uses a fairly simple thread model with the only complications coming from the deferred cancellation.
The default setup method simply calls StartThread and likewise the default Shutdown method calls StopThread. Resources for the driver should be allocated in MainSetup and cleaned up in MainQuit, these two methods will be called in the driver thread before and after the main method respectively.
When StopThread is called it will request the driver thread to be cancelled, this cancellation will be deffered until one of three cancellation points, ProcessMessages, Wait or TestCancel. In this way the driver has control over when the thread is cancelled.
If a new subscription arrives before the thread has terminated then upon completion of the MainQuit method the thread will be relaunched and MainSetup run. In this way it is gaurunteed that there is only ever one thread running for the driver and that Main is always proceeded by MainSetup and followed by MainQuit before any new threads are launched.
To manage the thread lifetime a small state machine is implemented, containing four states: STOPPED, RUNNING, STOPPING and RESTARTING. Initially the thread is in STOPPED state.
From the STOPPED state the only valid transition is to RUNNING, this is triggered by a call to StartThread.
From the RUNNING state the driver can transition to STOPPING, triggered by a call to StopThread.
In the STOPPING state the driver can transition to STOPPED, triggered by MainQuit running, or to RESTARTING on a call to StartThread.
From RESTARTING the driver can transition to RUNNING once MainQuit has run and the new thread is started, or to STOPPING if StopThread is called before the original thread terminates.
Public Member Functions | |
| ThreadedDriver (ConfigFile *cf, int section, bool overwrite_cmds, size_t queue_maxlen, int interface_) | |
| Constructor with implicit interface. More... | |
| ThreadedDriver (ConfigFile *cf, int section, bool overwrite_cmds=true, size_t queue_maxlen=PLAYER_MSGQUEUE_DEFAULT_MAXLEN) | |
| Constructor for multiple-interface drivers. More... | |
| virtual | ~ThreadedDriver () |
| Destructor. | |
| virtual int | Setup () |
| Initialize the driver. More... | |
| virtual int | Shutdown () |
| Finalize the driver. More... | |
| virtual int | Terminate () |
| Terminate the driver. More... | |
| virtual void | Main (void)=0 |
| Main method for driver thread. More... | |
| virtual int | MainSetup (void) |
| Sets up the resources needed by the driver thread. | |
| virtual void | MainQuit (void) |
| Cleanup method for driver thread (called when main exits) More... | |
| bool | Wait (double TimeOut=0.0) |
| Wait for new data to arrive on the driver's queue. More... | |
| virtual void | Update () |
| Update non-threaded drivers. More... | |
 Public Member Functions inherited from Driver Public Member Functions inherited from Driver | |
| bool | HasSubscriptions () |
| virtual void | Publish (player_devaddr_t addr, QueuePointer &queue, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_devaddr_t addr, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (QueuePointer &queue, player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds, size_t queue_maxlen, int interf) | |
| Constructor for single-interface drivers. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds=true, size_t queue_maxlen=PLAYER_MSGQUEUE_DEFAULT_MAXLEN) | |
| Constructor for multiple-interface drivers. More... | |
| virtual | ~Driver () |
| Destructor. | |
| int | GetError () |
| Get last error value. More... | |
| virtual int | Subscribe (player_devaddr_t addr) |
| Subscribe to this driver. More... | |
| virtual int | Subscribe (QueuePointer &, player_devaddr_t) |
| Subscribe to this driver. More... | |
| virtual int | Unsubscribe (player_devaddr_t addr) |
| Unsubscribe from this driver. More... | |
| virtual int | Unsubscribe (QueuePointer &, player_devaddr_t) |
| Unsubscribe from this driver. More... | |
| void | ProcessMessages (int maxmsgs) |
| Process pending messages. More... | |
| void | ProcessMessages (void) |
| Process pending messages. More... | |
| virtual int | ProcessMessage (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Message handler. More... | |
| virtual int | ProcessInternalMessages (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Internal message handler. More... | |
| virtual bool | RegisterProperty (const char *key, Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
| virtual bool | RegisterProperty (Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
Protected Member Functions | |
| virtual void | StartThread (void) |
| virtual void | StopThread (void) |
| Cancel (and wait for termination) of the driver thread. More... | |
| void | TestCancel () |
| enable thread cancellation and test for cancellation More... | |
| Protected Member Functions inherited from Driver | |
| int | AddInterface (player_devaddr_t addr) |
| Add an interface. More... | |
| int | AddInterface (player_devaddr_t *addr, ConfigFile *cf, int section, int code, const char *key=NULL) |
| Add an interface. More... | |
| void | SetError (int code) |
| Set/reset error code. | |
| int | AddFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Wake up the driver if the specified event occurs on the file descriptor. | |
| int | RemoveFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Remove a previously added watch, call with the same arguments as when adding the watch. | |
| virtual void | Lock (void) |
| Lock access between the server and driver threads. More... | |
| virtual void | Unlock (void) |
| Unlock access to driver internals. More... | |
| virtual void | SubscriptionLock (void) |
| Lock to protect the subscription count for the driver. | |
| virtual void | SubscriptionUnlock (void) |
| Unlock to protect the subscription count for the driver. More... | |
Static Protected Member Functions | |
| static void * | DummyMain (void *driver) |
| Dummy main (just calls real main). More... | |
| static void | DummyMainQuit (void *driver) |
| Dummy main cleanup (just calls real main cleanup). More... | |
Private Attributes | |
| pthread_t | driverthread |
| The driver's thread. More... | |
| player_thread_state_t | ThreadState |
| TODO: insert state machine here. | |
| bool | SetupSuccessful |
| PlayerBarrier | SetupBarrier |
| Barrier to synchronise threads on setup. | |
Additional Inherited Members | |
| Public Attributes inherited from Driver | |
| QueuePointer | ret_queue |
| Last requester's queue. More... | |
| player_devaddr_t | device_addr |
| Default device address (single-interface drivers) | |
| int | entries |
| Total number of entries in the device table using this driver. More... | |
| bool | alwayson |
| Always on flag. More... | |
| QueuePointer | InQueue |
| Queue for all incoming messages for this driver. | |
Constructor & Destructor Documentation
◆ ThreadedDriver() [1/2]
| ThreadedDriver::ThreadedDriver | ( | ConfigFile * | cf, |
| int | section, | ||
| bool | overwrite_cmds, | ||
| size_t | queue_maxlen, | ||
| int | interface_ | ||
| ) |
Constructor with implicit interface.
- Parameters
-
cf Current configuration file section Current section in configuration file overwrite_cmds Do new commands overwrite old ones? queue_maxlen How long can the incoming queue grow? interface_ The interface that you want this driver to provide
Referenced by Khepera::ProcessMessage(), and RFLEX::ProcessMessage().
◆ ThreadedDriver() [2/2]
| ThreadedDriver::ThreadedDriver | ( | ConfigFile * | cf, |
| int | section, | ||
| bool | overwrite_cmds = true, |
||
| size_t | queue_maxlen = PLAYER_MSGQUEUE_DEFAULT_MAXLEN |
||
| ) |
Constructor for multiple-interface drivers.
Use AddInterface() to specify individual interfaces.
- Parameters
-
cf Current configuration file section Current section in configuration file overwrite_cmds Do new commands overwrite old ones? queue_maxlen How long can the incoming queue grow?
Member Function Documentation
◆ DummyMain()
|
staticprotected |
Dummy main (just calls real main).
This is used to simplify thread creation.
◆ DummyMainQuit()
|
staticprotected |
Dummy main cleanup (just calls real main cleanup).
This is used to simplify thread termination.
◆ Main()
|
pure virtual |
Main method for driver thread.
drivers have their own thread of execution, created using StartThread(); this is the entry point for the driver thread, and must be overloaded by all threaded drivers.
Implemented in P2OS, ClodBuster, wbr914, Alsa, RFLEX, SegwayRMP, AdaptiveMCL, ER, REB, Khepera, SegwayRMP400, ImageBase, EpuckDriver, snd, SphereDriver, GarciaDriver, CameraUvc, and StatGrabDriver.
◆ MainQuit()
|
inlinevirtual |
Cleanup method for driver thread (called when main exits)
Overload this method and to do additional cleanup when the driver thread exits.
Reimplemented in P2OS, ClodBuster, wbr914, Alsa, RFLEX, AdaptiveMCL, REB, ER, Khepera, ImageBase, SegwayRMP400, EpuckDriver, SegwayRMP, SphereDriver, GarciaDriver, and CameraUvc.
References Driver::Wait().

◆ Setup()
|
virtual |
Initialize the driver.
This function is called with the first client subscribes; it MUST be implemented by the driver.
- Returns
- Returns 0 on success.
Reimplemented from Driver.
Reimplemented in snd.
Referenced by AdaptiveMCL::MainSetup().
◆ Shutdown()
|
virtual |
Finalize the driver.
This function is called with the last client unsubscribes; the default version simple stops the driver thread if one is present. In this case resources should be cleaned up in MainQuit.
- Returns
- Returns 0 on success.
Reimplemented from Driver.
Reimplemented in snd.
Referenced by AdaptiveMCL::MainQuit().
◆ StopThread()
|
protectedvirtual |
Cancel (and wait for termination) of the driver thread.
This method is usually called from the overloaded Shutdown() method to terminate the driver thread.
◆ Terminate()
|
virtual |
Terminate the driver.
This method doesnt go through the niceities of unsubscribing etc, only use when the server is actually shutting down as it takes a few shortcuts
- Returns
- Returns 0 on success.
Reimplemented from Driver.
◆ TestCancel()
|
protectedvirtual |
enable thread cancellation and test for cancellation
This should only ever be called from the driver thread with no locks held
Reimplemented from Driver.
◆ Update()
|
inlinevirtual |
Update non-threaded drivers.
Reimplemented from Driver.
◆ Wait()
|
virtual |
Wait for new data to arrive on the driver's queue.
Call this method to block until a new message arrives on Driver::InQueue. This method will return true immediately if at least one message is already waiting.
If TimeOut is set to a positive value this method will return false if the timeout occurs before and update is recieved.
Reimplemented from Driver.
Referenced by RFLEX::Main().
Member Data Documentation
◆ driverthread
|
private |
The driver's thread.
The driver's thread, when managed by StartThread() and StopThread().
The documentation for this class was generated from the following file:
Generated on Wed Sep 2 2020 16:39:30 for Player by
 1.8.13
1.8.13