

Public Member Functions | |
| Erratic (ConfigFile *cf, int section) | |
| virtual int | Subscribe (player_devaddr_t id) |
| Subscribe to this driver. More... | |
| virtual int | Unsubscribe (player_devaddr_t id) |
| Unsubscribe from this driver. More... | |
| virtual void | Main () |
| Talking to the Player architecture. | |
| virtual int | Setup () |
| Initialize the driver. More... | |
| virtual int | Shutdown () |
| Finalize the driver. More... | |
| virtual int | ProcessMessage (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Message handler. More... | |
 Public Member Functions inherited from Driver Public Member Functions inherited from Driver | |
| bool | HasSubscriptions () |
| virtual void | Publish (player_devaddr_t addr, QueuePointer &queue, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_devaddr_t addr, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (QueuePointer &queue, player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds, size_t queue_maxlen, int interf) | |
| Constructor for single-interface drivers. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds=true, size_t queue_maxlen=PLAYER_MSGQUEUE_DEFAULT_MAXLEN) | |
| Constructor for multiple-interface drivers. More... | |
| virtual | ~Driver () |
| Destructor. | |
| int | GetError () |
| Get last error value. More... | |
| virtual int | Subscribe (QueuePointer &, player_devaddr_t) |
| Subscribe to this driver. More... | |
| virtual int | Unsubscribe (QueuePointer &, player_devaddr_t) |
| Unsubscribe from this driver. More... | |
| virtual int | Terminate () |
| Terminate the driver. More... | |
| void | ProcessMessages (int maxmsgs) |
| Process pending messages. More... | |
| void | ProcessMessages (void) |
| Process pending messages. More... | |
| virtual void | Update () |
| Update non-threaded drivers. More... | |
| virtual int | ProcessInternalMessages (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Internal message handler. More... | |
| virtual bool | RegisterProperty (const char *key, Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
| virtual bool | RegisterProperty (Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
Private Member Functions | |
| int | Connect () |
| int | Disconnect () |
| void | ResetRawPositions () |
| void | ToggleMotorPower (unsigned char val) |
| void | ToggleAIn (unsigned char val) |
| void | ToggleSonar (unsigned char val) |
| int | HandleConfig (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| int | HandleCommand (player_msghdr *hdr, void *data) |
| void | HandlePositionCommand (player_position2d_cmd_vel_t position_cmd) |
| void | HandleCarCommand (player_position2d_cmd_car_t position_cmd) |
| void | HandlePtzCommand (player_ptz_cmd_t ptz_cmd, player_devaddr_t id) |
| void | PublishAllData () |
| void | PublishPosition2D () |
| void | PublishPower () |
| void | PublishAIn () |
| void | PublishIR () |
| void | PublishSonar () |
| float | IRRangeFromVoltage (float voltage) |
| float | IRFloorRange (float value) |
| void | StartThreads () |
| void | StopThreads () |
| void | Send (ErraticPacket *packet) |
| void | SendThread () |
| void | ReceiveThread () |
| Talking to the robot. | |
Static Private Member Functions | |
| static void * | SendThreadDummy (void *driver) |
| static void * | ReceiveThreadDummy (void *driver) |
Private Attributes | |
| int | mcount |
| player_erratic_data_t | erratic_data |
| player_devaddr_t | position_id |
| player_devaddr_t | power_id |
| player_devaddr_t | aio_id |
| player_devaddr_t | ir_id |
| player_devaddr_t | sonar_id |
| player_devaddr_t | ptz_id |
| player_devaddr_t | ptz2_id |
| int | position_subscriptions |
| int | aio_ir_subscriptions |
| int | sonar_subscriptions |
| int | ptz_subscriptions |
| int | ptz2_subscriptions |
| ErraticMotorPacket * | motor_packet |
| pthread_mutex_t | motor_packet_mutex |
| int | read_fd |
| int | write_fd |
| const char * | psos_serial_port |
| player_position2d_cmd_vel_t | last_position_cmd |
| player_position2d_cmd_car_t | last_car_cmd |
| std::queue< ErraticPacket * > | send_queue |
| pthread_mutex_t | send_queue_mutex |
| pthread_cond_t | send_queue_cond |
| pthread_t | send_thread |
| pthread_t | receive_thread |
| bool | direct_wheel_vel_control |
| bool | print_all_packets |
| bool | print_status_summary |
| bool | save_settings_in_robot |
| int | param_idx |
| int | motor_max_speed |
| int | motor_max_turnspeed |
| int16_t | pid_trans_p |
| int16_t | pid_trans_v |
| int16_t | pid_trans_i |
| int16_t | pid_rot_p |
| int16_t | pid_rot_v |
| int16_t | pid_rot_i |
| uint16_t | motor_pwm_frequency |
| uint16_t | motor_pwm_max_on |
| bool | use_vel_band |
| short | motor_max_trans_accel |
| short | motor_max_trans_decel |
| short | motor_max_rot_accel |
| short | motor_max_rot_decel |
Additional Inherited Members | |
| Public Attributes inherited from Driver | |
| QueuePointer | ret_queue |
| Last requester's queue. More... | |
| player_devaddr_t | device_addr |
| Default device address (single-interface drivers) | |
| int | entries |
| Total number of entries in the device table using this driver. More... | |
| bool | alwayson |
| Always on flag. More... | |
| QueuePointer | InQueue |
| Queue for all incoming messages for this driver. | |
| Protected Member Functions inherited from Driver | |
| int | AddInterface (player_devaddr_t addr) |
| Add an interface. More... | |
| int | AddInterface (player_devaddr_t *addr, ConfigFile *cf, int section, int code, const char *key=NULL) |
| Add an interface. More... | |
| void | SetError (int code) |
| Set/reset error code. | |
| virtual bool | Wait (double TimeOut=0.0) |
| Wait for new data to arrive on the driver's queue. More... | |
| int | AddFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Wake up the driver if the specified event occurs on the file descriptor. | |
| int | RemoveFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Remove a previously added watch, call with the same arguments as when adding the watch. | |
| virtual void | Lock (void) |
| Lock access between the server and driver threads. More... | |
| virtual void | Unlock (void) |
| Unlock access to driver internals. More... | |
| virtual void | SubscriptionLock (void) |
| Lock to protect the subscription count for the driver. | |
| virtual void | SubscriptionUnlock (void) |
| Unlock to protect the subscription count for the driver. More... | |
| virtual void | TestCancel () |
| enable thread cancellation and test for cancellation More... | |
Member Function Documentation
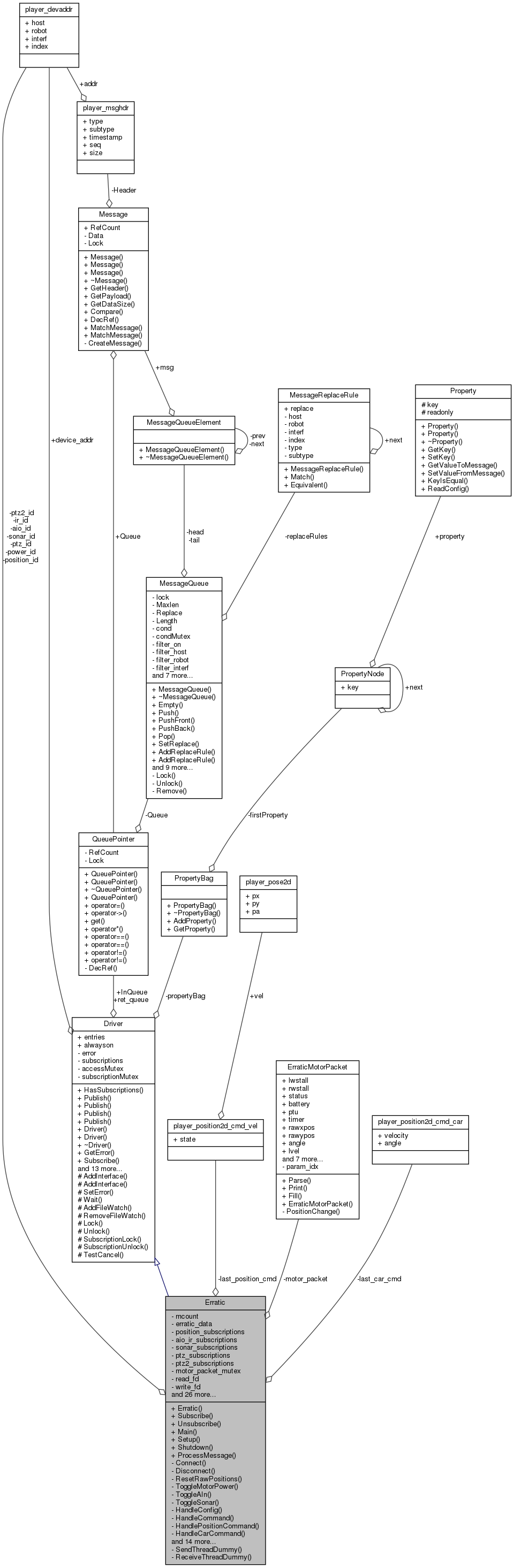
◆ ProcessMessage()
|
virtual |
Message handler.
This function is called once for each message in the incoming queue. Reimplement it to provide message handling. Return 0 if you handled the message and -1 otherwise
- Parameters
-
resp_queue The queue to which any response should go. hdr The message header data The message body
Reimplemented from Driver.
References player_position2d_cmd_car::angle, Device::MatchDeviceAddress(), Message::MatchMessage(), player_pose2d::pa, player_ptz_cmd::pan, PLAYER_IR_REQ_POSE, PLAYER_MSGTYPE_CMD, PLAYER_MSGTYPE_REQ, PLAYER_MSGTYPE_RESP_ACK, PLAYER_POSITION2D_CMD_CAR, PLAYER_POSITION2D_CMD_VEL, PLAYER_POSITION2D_CMD_VEL_HEAD, PLAYER_POSITION2D_REQ_GET_GEOM, PLAYER_POSITION2D_REQ_MOTOR_POWER, PLAYER_POSITION2D_REQ_RESET_ODOM, PLAYER_POSITION2D_REQ_SET_ODOM, PLAYER_POSITION2D_REQ_VELOCITY_MODE, PLAYER_PTZ_CMD_STATE, PLAYER_SONAR_DATA_GEOM, PLAYER_SONAR_REQ_GET_GEOM, PLAYER_WARN, player_position2d_geom::pose, player_position2d_set_odom_req::pose, player_sonar_geom::poses, player_ir_pose::poses, player_sonar_geom::poses_count, player_ir_pose::poses_count, Driver::Publish(), player_pose2d::px, player_pose3d::px, player_pose2d::py, player_pose3d::py, player_pose3d::pyaw, player_msghdr::size, player_position2d_geom::size, player_bbox3d::sl, player_position2d_power_config::state, player_bbox3d::sw, player_ptz_cmd::tilt, player_msghdr::type, player_position2d_velocity_mode_config::value, player_position2d_cmd_vel::vel, and player_position2d_cmd_car::velocity.
◆ Setup()
|
virtual |
Initialize the driver.
This function is called with the first client subscribes; it MUST be implemented by the driver.
- Returns
- Returns 0 on success.
Reimplemented from Driver.
◆ Shutdown()
|
virtual |
Finalize the driver.
This function is called with the last client unsubscribes.
- Returns
- Returns 0 on success.
Reimplemented from Driver.
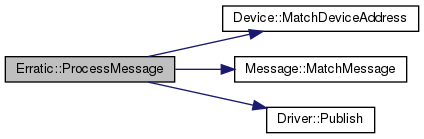
◆ Subscribe()
|
virtual |
Subscribe to this driver.
The Subscribe() and Unsubscribe() methods are used to control subscriptions to the driver; a driver MAY override them, but usually won't.
- Parameters
-
addr Address of the device to subscribe to (the driver may have more than one interface).
- Returns
- Returns 0 on success.
Reimplemented from Driver.
References Device::MatchDeviceAddress(), and Driver::Subscribe().
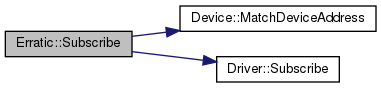
◆ Unsubscribe()
|
virtual |
Unsubscribe from this driver.
The Subscribe() and Unsubscribe() methods are used to control subscriptions to the driver; a driver MAY override them, but usually won't.
- Parameters
-
addr Address of the device to unsubscribe from (the driver may have more than one interface).
- Returns
- Returns 0 on success.
Reimplemented from Driver.
References Device::MatchDeviceAddress(), and Driver::Unsubscribe().
The documentation for this class was generated from the following files:
- erratic.h
- erratic.cc
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13