

Public Member Functions | |
| snd (ConfigFile *cf, int section) | |
| virtual int | Setup () |
| Initialize the driver. More... | |
| virtual int | Shutdown () |
| Finalize the driver. More... | |
| virtual int | ProcessMessage (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Message handler. More... | |
| void | WaitForNextGoal () |
| void | SignalNextGoal (double goalX, double goalY, double goalA) |
| void | Read () |
| void | ReadIfWaiting () |
 Public Member Functions inherited from ThreadedDriver Public Member Functions inherited from ThreadedDriver | |
| ThreadedDriver (ConfigFile *cf, int section, bool overwrite_cmds, size_t queue_maxlen, int interface_) | |
| Constructor with implicit interface. More... | |
| ThreadedDriver (ConfigFile *cf, int section, bool overwrite_cmds=true, size_t queue_maxlen=PLAYER_MSGQUEUE_DEFAULT_MAXLEN) | |
| Constructor for multiple-interface drivers. More... | |
| virtual | ~ThreadedDriver () |
| Destructor. | |
| virtual int | Terminate () |
| Terminate the driver. More... | |
| virtual int | MainSetup (void) |
| Sets up the resources needed by the driver thread. | |
| virtual void | MainQuit (void) |
| Cleanup method for driver thread (called when main exits) More... | |
| bool | Wait (double TimeOut=0.0) |
| Wait for new data to arrive on the driver's queue. More... | |
| virtual void | Update () |
| Update non-threaded drivers. More... | |
| Public Member Functions inherited from Driver | |
| bool | HasSubscriptions () |
| virtual void | Publish (player_devaddr_t addr, QueuePointer &queue, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_devaddr_t addr, uint8_t type, uint8_t subtype, void *src=NULL, size_t deprecated=0, double *timestamp=NULL, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (QueuePointer &queue, player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| virtual void | Publish (player_msghdr_t *hdr, void *src, bool copy=true) |
| Publish a message via one of this driver's interfaces. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds, size_t queue_maxlen, int interf) | |
| Constructor for single-interface drivers. More... | |
| Driver (ConfigFile *cf, int section, bool overwrite_cmds=true, size_t queue_maxlen=PLAYER_MSGQUEUE_DEFAULT_MAXLEN) | |
| Constructor for multiple-interface drivers. More... | |
| virtual | ~Driver () |
| Destructor. | |
| int | GetError () |
| Get last error value. More... | |
| virtual int | Subscribe (player_devaddr_t addr) |
| Subscribe to this driver. More... | |
| virtual int | Subscribe (QueuePointer &, player_devaddr_t) |
| Subscribe to this driver. More... | |
| virtual int | Unsubscribe (player_devaddr_t addr) |
| Unsubscribe from this driver. More... | |
| virtual int | Unsubscribe (QueuePointer &, player_devaddr_t) |
| Unsubscribe from this driver. More... | |
| void | ProcessMessages (int maxmsgs) |
| Process pending messages. More... | |
| void | ProcessMessages (void) |
| Process pending messages. More... | |
| virtual int | ProcessInternalMessages (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Internal message handler. More... | |
| virtual bool | RegisterProperty (const char *key, Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
| virtual bool | RegisterProperty (Property *property, ConfigFile *cf, int section) |
| Property registration. More... | |
Public Attributes | |
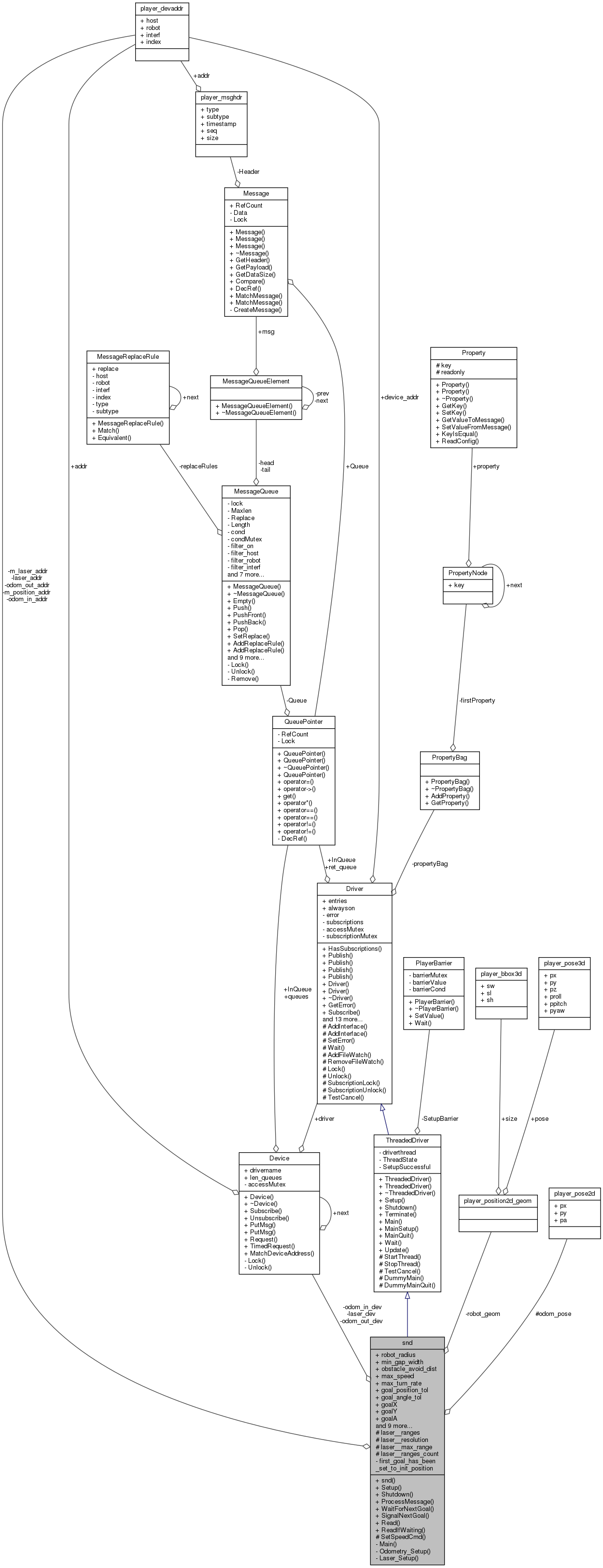
| double | robot_radius |
| double | min_gap_width |
| double | obstacle_avoid_dist |
| double | max_speed |
| double | max_turn_rate |
| double | goal_position_tol |
| double | goal_angle_tol |
| double | goalX |
| double | goalY |
| double | goalA |
| pthread_t | algorithm_thread |
| pthread_mutex_t | goal_mutex |
| pthread_cond_t | goal_changed_cond |
| double | goal_changed |
| pthread_mutex_t | data_mutex |
| pthread_cond_t | data_changed_cond |
| double | data_changed |
| int | data_odometry_ready |
| int | data_laser_ready |
| Public Attributes inherited from Driver | |
| QueuePointer | ret_queue |
| Last requester's queue. More... | |
| player_devaddr_t | device_addr |
| Default device address (single-interface drivers) | |
| int | entries |
| Total number of entries in the device table using this driver. More... | |
| bool | alwayson |
| Always on flag. More... | |
| QueuePointer | InQueue |
| Queue for all incoming messages for this driver. | |
Protected Member Functions | |
| void | SetSpeedCmd (player_position2d_cmd_vel_t cmd) |
| Protected Member Functions inherited from ThreadedDriver | |
| virtual void | StartThread (void) |
| virtual void | StopThread (void) |
| Cancel (and wait for termination) of the driver thread. More... | |
| void | TestCancel () |
| enable thread cancellation and test for cancellation More... | |
| Protected Member Functions inherited from Driver | |
| int | AddInterface (player_devaddr_t addr) |
| Add an interface. More... | |
| int | AddInterface (player_devaddr_t *addr, ConfigFile *cf, int section, int code, const char *key=NULL) |
| Add an interface. More... | |
| void | SetError (int code) |
| Set/reset error code. | |
| int | AddFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Wake up the driver if the specified event occurs on the file descriptor. | |
| int | RemoveFileWatch (int fd, bool ReadWatch=true, bool WriteWatch=false, bool ExceptWatch=true) |
| Remove a previously added watch, call with the same arguments as when adding the watch. | |
| virtual void | Lock (void) |
| Lock access between the server and driver threads. More... | |
| virtual void | Unlock (void) |
| Unlock access to driver internals. More... | |
| virtual void | SubscriptionLock (void) |
| Lock to protect the subscription count for the driver. | |
| virtual void | SubscriptionUnlock (void) |
| Unlock to protect the subscription count for the driver. More... | |
Protected Attributes | |
| player_pose2d_t | odom_pose |
| std::vector< double > | laser__ranges |
| double | laser__resolution |
| double | laser__max_range |
| uint32_t | laser__ranges_count |
Private Member Functions | |
| virtual void | Main () |
| Main method for driver thread. More... | |
| int | Odometry_Setup () |
| int | Laser_Setup () |
Private Attributes | |
| player_devaddr_t | m_position_addr |
| player_devaddr_t | m_laser_addr |
| player_devaddr_t | laser_addr |
| player_devaddr_t | odom_in_addr |
| player_devaddr_t | odom_out_addr |
| Device * | laser_dev |
| Device * | odom_in_dev |
| Device * | odom_out_dev |
| player_position2d_geom_t | robot_geom |
| int | first_goal_has_been_set_to_init_position |
Additional Inherited Members | |
| Static Protected Member Functions inherited from ThreadedDriver | |
| static void * | DummyMain (void *driver) |
| Dummy main (just calls real main). More... | |
| static void | DummyMainQuit (void *driver) |
| Dummy main cleanup (just calls real main cleanup). More... | |
Member Function Documentation
◆ Main()
|
privatevirtual |
Main method for driver thread.
drivers have their own thread of execution, created using StartThread(); this is the entry point for the driver thread, and must be overloaded by all threaded drivers.
Implements ThreadedDriver.
References PLAYER_MSG0, PLAYER_MSGTYPE_CMD, and PLAYER_POSITION2D_CMD_VEL.
◆ ProcessMessage()
|
virtual |
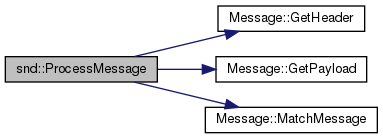
Message handler.
This function is called once for each message in the incoming queue. Reimplement it to provide message handling. Return 0 if you handled the message and -1 otherwise
- Parameters
-
resp_queue The queue to which any response should go. hdr The message header data The message body
Reimplemented from Driver.
References player_msghdr::addr, Message::GetHeader(), Message::GetPayload(), Message::MatchMessage(), player_pose2d::pa, PLAYER_ERROR, PLAYER_LASER_DATA_SCAN, PLAYER_MSG0, PLAYER_MSG3, PLAYER_MSGTYPE_CMD, PLAYER_MSGTYPE_DATA, PLAYER_MSGTYPE_REQ, PLAYER_POSITION2D_CMD_POS, PLAYER_POSITION2D_CMD_VEL, PLAYER_POSITION2D_DATA_STATE, PLAYER_WARN1, player_position2d_cmd_pos::pos, player_pose2d::px, player_pose2d::py, player_msghdr::size, player_msghdr::subtype, player_msghdr::timestamp, player_msghdr::type, and player_position2d_cmd_vel::vel.
◆ Setup()
|
virtual |
Initialize the driver.
This function is called with the first client subscribes; it MUST be implemented by the driver.
- Returns
- Returns 0 on success.
Reimplemented from ThreadedDriver.
References PLAYER_MSG0.
◆ Shutdown()
|
virtual |
Finalize the driver.
This function is called with the last client unsubscribes; the default version simple stops the driver thread if one is present. In this case resources should be cleaned up in MainQuit.
- Returns
- Returns 0 on success.
Reimplemented from ThreadedDriver.
References PLAYER_MSG0.
The documentation for this class was generated from the following files:
- snd.h
- snd.cc
Generated on Wed Sep 2 2020 16:39:30 for Player by
 1.8.13
1.8.13