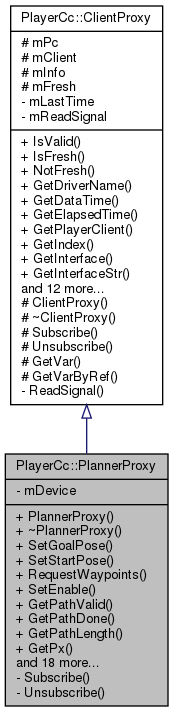
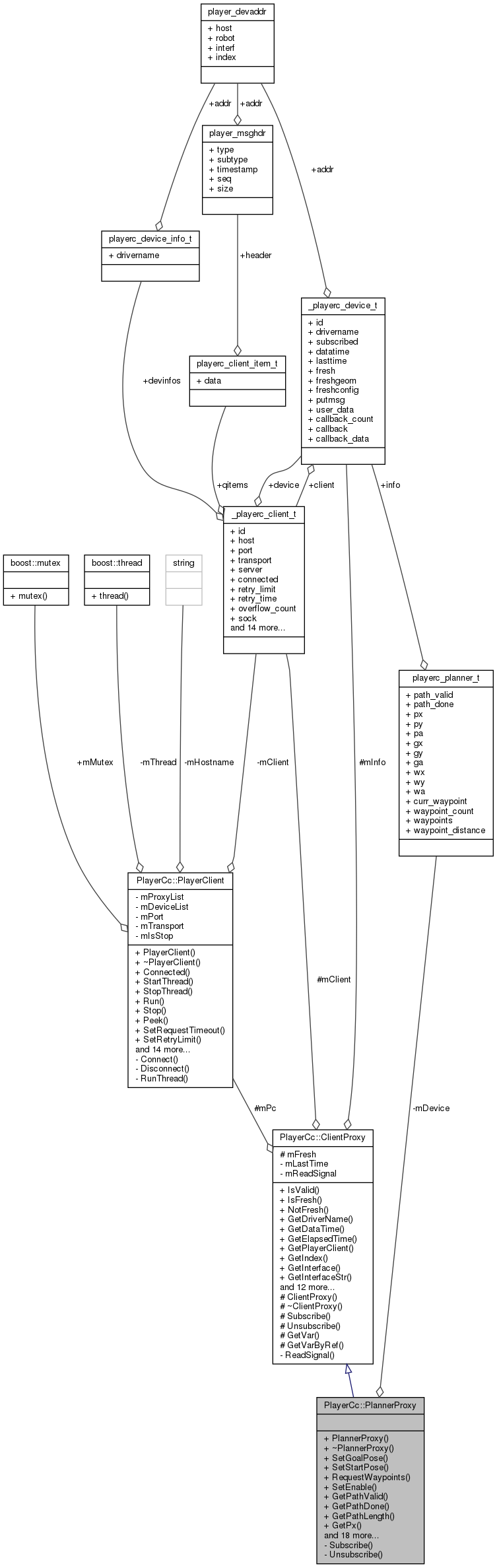
The PlannerProxy proxy provides an interface to a 2D motion planner.
|
|
| PlannerProxy (PlayerClient *aPc, uint32_t aIndex=0) |
| | Constructor.
|
| |
|
| ~PlannerProxy () |
| | Destructor.
|
| |
|
void | SetGoalPose (double aGx, double aGy, double aGa) |
| | Set the goal pose (gx, gy, ga)
|
| |
|
void | SetStartPose (double aSx, double aSy, double aSa) |
| | Set the start pose (sx, sy, sa)
|
| |
| void | RequestWaypoints () |
| | Get the list of waypoints. More...
|
| |
| void | SetEnable (bool aEnable) |
| | Enable/disable the robot's motion. More...
|
| |
|
uint32_t | GetPathValid () const |
| | Did the planner find a valid path?
|
| |
|
uint32_t | GetPathDone () const |
| | Have we arrived at the goal?
|
| |
| double | GetPathLength () const |
| | Get straight-line distance along path. More...
|
| |
| double | GetPx () const |
| | Current pose (m) More...
|
| |
| double | GetPy () const |
| | Current pose (m) More...
|
| |
| double | GetPa () const |
| | Current pose (radians) More...
|
| |
|
player_pose2d_t | GetPose () const |
| | Get the current pose.
|
| |
| double | GetGx () const |
| | Goal location (m) More...
|
| |
| double | GetGy () const |
| | Goal location (m) More...
|
| |
| double | GetGa () const |
| | Goal location (radians) More...
|
| |
|
player_pose2d_t | GetGoal () const |
| | Get the goal.
|
| |
| double | GetWx () const |
| | Current waypoint location (m) More...
|
| |
| double | GetWy () const |
| | Current waypoint location (m) More...
|
| |
| double | GetWa () const |
| | Current waypoint location (rad) More...
|
| |
|
player_pose2d_t | GetCurrentWaypoint () const |
| | Get the current waypoint.
|
| |
| double | GetIx (int i) const |
| | Grab a particular waypoint location (m) More...
|
| |
| double | GetIy (int i) const |
| | Grab a particular waypoint location (m) More...
|
| |
| double | GetIa (int i) const |
| | Grab a particular waypoint location (rad) More...
|
| |
|
player_pose2d_t | GetWaypoint (uint32_t aIndex) const |
| | Get the waypoint.
|
| |
| int | GetCurrentWaypointId () const |
| | Current waypoint index (handy if you already have the list of waypoints). More...
|
| |
|
uint32_t | GetWaypointCount () const |
| | Number of waypoints in the plan.
|
| |
| player_pose2d_t | operator[] (uint32_t aIndex) const |
| | Waypoint access operator This operator provides an alternate way of access the waypoint data. More...
|
| |
| bool | IsValid () const |
| | Proxy has any information. More...
|
| |
| bool | IsFresh () const |
| | Check for fresh data. More...
|
| |
| void | NotFresh () |
| | Reset Fresh flag. More...
|
| |
| std::string | GetDriverName () const |
| | Get the underlying driver's name. More...
|
| |
|
double | GetDataTime () const |
| | Returns the received timestamp of the last data sample [s].
|
| |
|
double | GetElapsedTime () const |
| | Returns the time between the current data time and the time of the last data sample [s].
|
| |
| PlayerClient * | GetPlayerClient () const |
| | Get a pointer to the Player Client. More...
|
| |
| uint32_t | GetIndex () const |
| | Get device index. More...
|
| |
| uint32_t | GetInterface () const |
| | Get Interface Code. More...
|
| |
| std::string | GetInterfaceStr () const |
| | Get Interface Name. More...
|
| |
| void | SetReplaceRule (bool aReplace, int aType=-1, int aSubtype=-1) |
| | Set a replace rule for this proxy on the server. More...
|
| |
| int | HasCapability (uint32_t aType, uint32_t aSubtype) |
| | Request capabilities of device. More...
|
| |
| int | GetBoolProp (char *aProperty, bool *aValue) |
| | Request a boolean property. More...
|
| |
| int | SetBoolProp (char *aProperty, bool aValue) |
| | Set a boolean property. More...
|
| |
| int | GetIntProp (char *aProperty, int32_t *aValue) |
| | Request an integer property. More...
|
| |
| int | SetIntProp (char *aProperty, int32_t aValue) |
| | Set an integer property. More...
|
| |
| int | GetDblProp (char *aProperty, double *aValue) |
| | Request a double property. More...
|
| |
| int | SetDblProp (char *aProperty, double aValue) |
| | Set a double property. More...
|
| |
| int | GetStrProp (char *aProperty, char **aValue) |
| | Request a string property. More...
|
| |
| int | SetStrProp (char *aProperty, char *aValue) |
| | Set a string property. More...
|
| |
| template<typename T > |
| connection_t | ConnectReadSignal (T aSubscriber) |
| | Connect a read signal to this proxy. More...
|
| |
| void | DisconnectReadSignal (connection_t aSubscriber) |
| | Disconnect a signal from this proxy. More...
|
| |

 Public Member Functions inherited from PlayerCc::ClientProxy
Public Member Functions inherited from PlayerCc::ClientProxy 1.8.13
1.8.13