
Planner device data. More...
#include <playerc.h>
Detailed Description
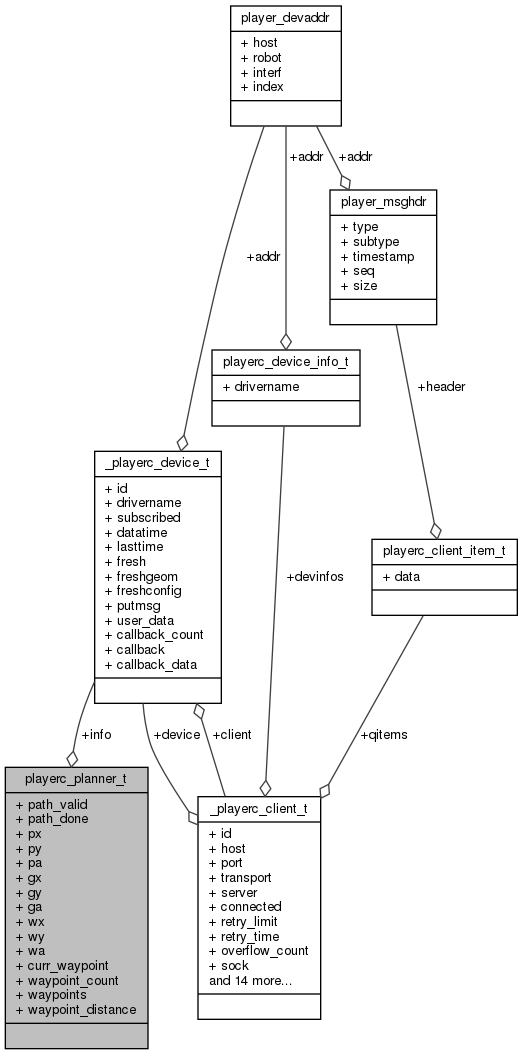
Planner device data.
Public Attributes | |
| playerc_device_t | info |
| Device info; must be at the start of all device structures. More... | |
| int | path_valid |
| Did the planner find a valid path? | |
| int | path_done |
| Have we arrived at the goal? | |
| double | px |
| Current pose (m, m, radians). More... | |
| double | py |
| double | pa |
| double | gx |
| Goal location (m, m, radians) | |
| double | gy |
| double | ga |
| double | wx |
| Current waypoint location (m, m, radians) | |
| double | wy |
| double | wa |
| int | curr_waypoint |
| Current waypoint index (handy if you already have the list of waypoints). More... | |
| int | waypoint_count |
| Number of waypoints in the plan. | |
| double(* | waypoints )[3] |
| List of waypoints in the current plan (m,m,radians). More... | |
| double | waypoint_distance |
| Straight-line distance along allwaypoints in the current plan. More... | |
Member Data Documentation
◆ curr_waypoint
| int playerc_planner_t::curr_waypoint |
Current waypoint index (handy if you already have the list of waypoints).
May be negative if there's no plan, or if the plan is done
Referenced by PlayerCc::PlannerProxy::GetCurrentWaypointId().
◆ info
| playerc_device_t playerc_planner_t::info |
Device info; must be at the start of all device structures.
◆ px
| double playerc_planner_t::px |
Current pose (m, m, radians).
Referenced by PlayerCc::PlannerProxy::GetPose(), and PlayerCc::PlannerProxy::GetPx().
◆ waypoint_distance
| double playerc_planner_t::waypoint_distance |
Straight-line distance along allwaypoints in the current plan.
Call playerc_planner_get_waypoints() to fill this in.
Referenced by PlayerCc::PlannerProxy::GetPathLength().
◆ waypoints
| double(* playerc_planner_t::waypoints)[3] |
List of waypoints in the current plan (m,m,radians).
Call playerc_planner_get_waypoints() to fill this in.
Referenced by PlayerCc::PlannerProxy::GetWaypoint().
The documentation for this struct was generated from the following file:
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13