
List of all members |
Public Member Functions |
Public Attributes |
Private Member Functions |
Private Attributes
RobotLocation Class Reference
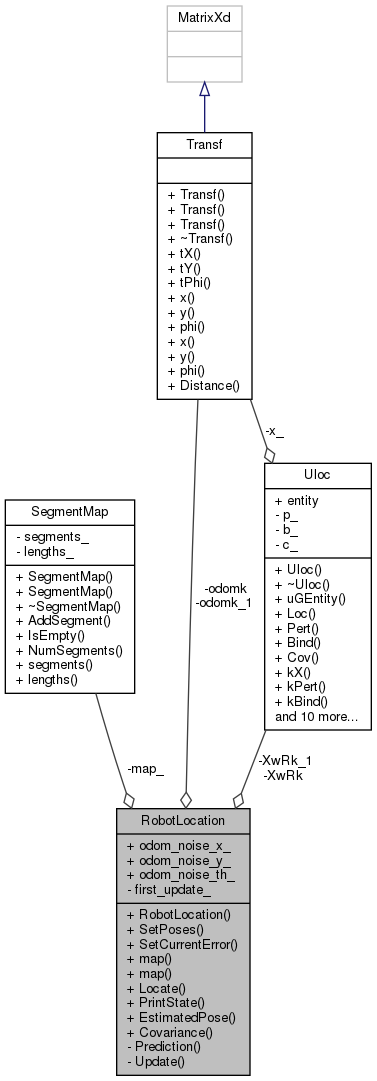
Collaboration diagram for RobotLocation:
Public Member Functions | |
| RobotLocation (double odom_noise_x, double odom_noise_y, double odom_noise_th) | |
| void | SetPoses (double ox, double oy, double oth, double gx, double gy, double gth) |
| Inform the current odometric and global (map) pose. | |
| void | SetCurrentError (double ex, double ey, double eth) |
| Inform the error for the initial pose Robot is expected to be at x +/- (ex/2) | |
| SegmentMap & | map (void) |
| const SegmentMap & | map (void) const |
| bool | Locate (const Transf odom, const Scan s) |
| void | PrintState () const |
| Pose | EstimatedPose (void) const |
| MatrixXd | Covariance (void) const |
Public Attributes | |
| const double | odom_noise_x_ |
| const double | odom_noise_y_ |
| const double | odom_noise_th_ |
Private Member Functions | |
| void | Prediction () |
| void | Update (ObservedFeatures obs) |
Private Attributes | |
| Uloc | XwRk_1 |
| Uloc | XwRk |
| Transf | odomk_1 |
| Transf | odomk |
| SegmentMap | map_ |
| bool | first_update_ |
The documentation for this class was generated from the following files:
- robot_location.hh
- robot_location.cc
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13