
List of all members |
Public Member Functions |
Public Attributes |
Private Member Functions |
Private Attributes
Scan Class Reference
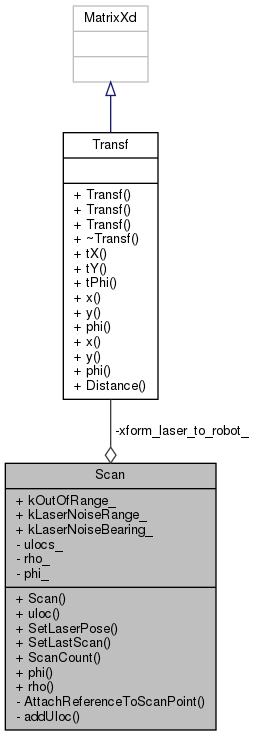
Collaboration diagram for Scan:
Public Member Functions | |
| Scan (double max_range, double laser_x, double laser_y, double laser_angle, double laser_noise_range, double laser_noise_bearing) | |
| Provide laser parameters: maximum range and its pose on top of robot, and noise model. More... | |
| const Uloc & | uloc (const int i) const |
| void | SetLaserPose (double x, double y, double a) |
| Update laser pose. | |
| void | SetLastScan (const DoublesVector &ranges, const DoublesVector &bearings) |
| Set last laser reading Removes out of range values and attaches the uncertainty model. | |
| int | ScanCount (void) const |
| double | phi (const int i) const |
| double | rho (const int i) const |
Public Attributes | |
| const double | kOutOfRange_ |
| const double | kLaserNoiseRange_ |
| const double | kLaserNoiseBearing_ |
Private Member Functions | |
| Uloc | AttachReferenceToScanPoint (double rho, double phi) |
| void | addUloc (Uloc u) |
Private Attributes | |
| vector< Uloc > | ulocs_ |
| DoublesVector | rho_ |
| DoublesVector | phi_ |
| Transf | xform_laser_to_robot_ |
Constructor & Destructor Documentation
◆ Scan()
| Scan::Scan | ( | double | max_range, |
| double | laser_x, | ||
| double | laser_y, | ||
| double | laser_angle, | ||
| double | laser_noise_range, | ||
| double | laser_noise_bearing | ||
| ) |
Provide laser parameters: maximum range and its pose on top of robot, and noise model.
The documentation for this class was generated from the following files:
- scan.hh
- scan.cc
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13