
Localize Class Reference
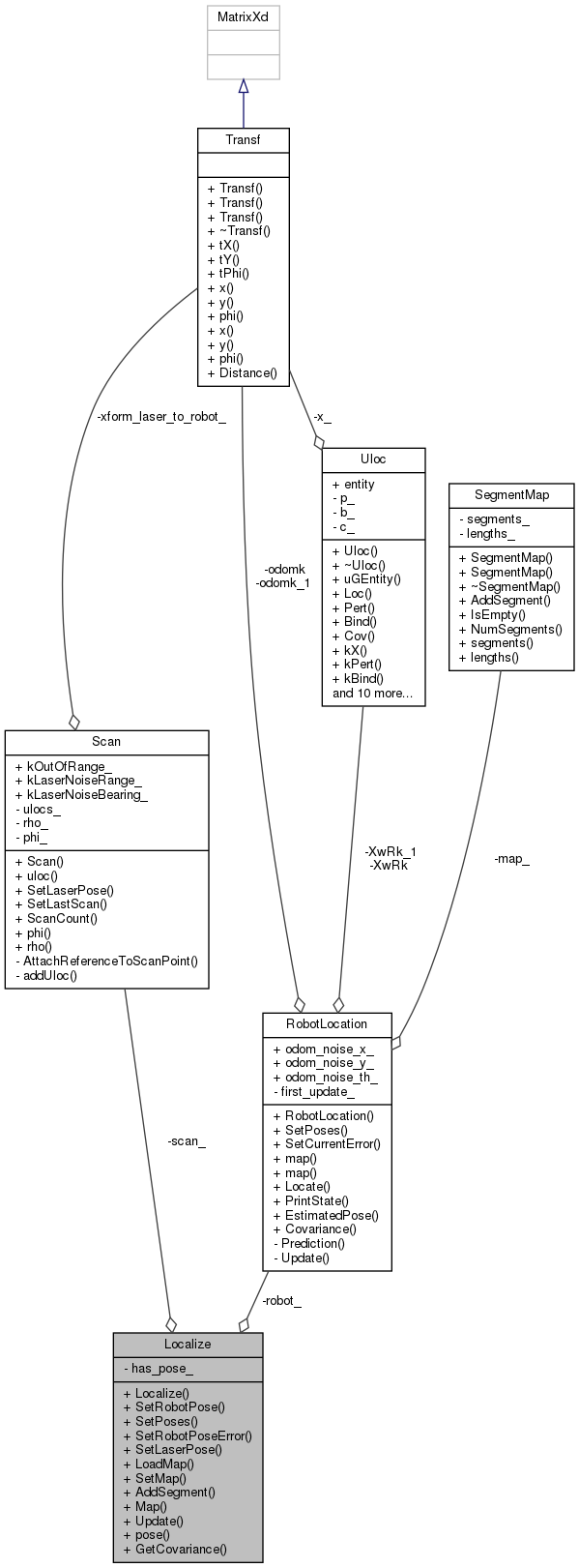
Collaboration diagram for Localize:
Public Member Functions | |
| Localize (double laser_max_range, double laser_pose_x, double laser_pose_y, double laser_pose_angle, double laser_noise_range, double laser_noise_bearing, double odom_noise_x, double odom_noise_y, double odom_noise_angle) | |
| Initialize parameters. | |
| void | SetRobotPose (double x, double y, double angle) |
| Initialize robot map pose, and reset odometry to zero. | |
| void | SetPoses (double ox, double oy, double oth, double gx, double gy, double gth) |
| Initialize both odometry (if it is not zero) and global (map) pose. | |
| void | SetRobotPoseError (double ex, double ey, double eth) |
| Initial pose error. | |
| void | SetLaserPose (double x, double y, double a) |
| Update laser pose (limited to x, y ,a for now, though) m m rad. | |
| void | LoadMap (const char *filename) |
| void | SetMap (const SegmentsVector &map) |
| void | AddSegment (const Segment &segment) |
| const SegmentMap & | Map (void) const |
| bool | Update (double robot_x, double robot_y, double robot_angle, DoublesVector ranges, DoublesVector bearings) |
| Compute actualization from robot accumulated odometry and laser reading Returns true if the update was performed (minimum delta in odometry) More... | |
| Pose | pose (void) const |
| MatrixXd | GetCovariance (void) const |
Private Attributes | |
| Scan | scan_ |
| RobotLocation | robot_ |
| bool | has_pose_ |
Member Function Documentation
◆ Update()
| bool Localize::Update | ( | double | robot_x, |
| double | robot_y, | ||
| double | robot_angle, | ||
| DoublesVector | ranges, | ||
| DoublesVector | bearings | ||
| ) |
Compute actualization from robot accumulated odometry and laser reading Returns true if the update was performed (minimum delta in odometry)
Compute actualization from robot accumulated odometry and laser reading.
References Scan::SetLastScan().
Here is the call graph for this function:

The documentation for this class was generated from the following files:
- localize.hh
- localize.cc
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13