
Laser proxy data. More...
#include <playerc.h>
Detailed Description
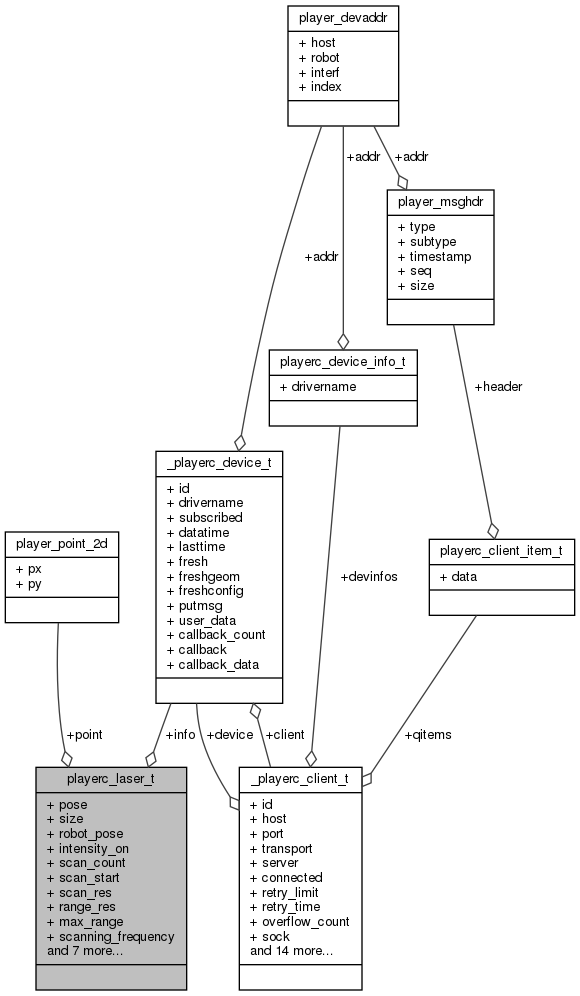
Laser proxy data.
Public Attributes | |
| playerc_device_t | info |
| Device info; must be at the start of all device structures. More... | |
| double | pose [3] |
| Laser geometry in the robot cs: pose gives the position and orientation, size gives the extent. More... | |
| double | size [2] |
| double | robot_pose [3] |
| Robot pose (m,m,rad), filled in if the scan came with a pose attached. | |
| int | intensity_on |
| Is intesity data returned. More... | |
| int | scan_count |
| Number of points in the scan. More... | |
| double | scan_start |
| Start bearing of the scan (radians). More... | |
| double | scan_res |
| Angular resolution in radians. More... | |
| double | range_res |
| Range resolution, in m. More... | |
| double | max_range |
| Maximum range of sensor, in m. More... | |
| double | scanning_frequency |
| Scanning frequency in Hz. More... | |
| double * | ranges |
| Raw range data; range (m). More... | |
| double(* | scan )[2] |
| Scan data; range (m) and bearing (radians). More... | |
| player_point_2d_t * | point |
| Scan data; x, y position (m). More... | |
| int * | intensity |
| Scan reflection intensity values (0-3). More... | |
| int | scan_id |
| ID for this scan. | |
| int | laser_id |
| Laser IDentification information. | |
| double | min_right |
| Minimum range, in meters, in the right half of the scan (those ranges from the first beam, counterclockwise, up to the middle of the scan, including the middle beam, if one exists). More... | |
| double | min_left |
| Minimum range, in meters, in the left half of the scan (those ranges from the first beam after the middle of the scan, counterclockwise, to the last beam). More... | |
Member Data Documentation
◆ info
| playerc_device_t playerc_laser_t::info |
Device info; must be at the start of all device structures.
◆ intensity
| int* playerc_laser_t::intensity |
Scan reflection intensity values (0-3).
Note that the intensity values will only be filled if intensity information is enabled (using the set_config function).
Referenced by PlayerCc::LaserProxy::GetIntensity().
◆ intensity_on
| int playerc_laser_t::intensity_on |
Is intesity data returned.
Referenced by PlayerCc::LaserProxy::IntensityOn().
◆ max_range
| double playerc_laser_t::max_range |
Maximum range of sensor, in m.
Referenced by PlayerCc::LaserProxy::GetMaxRange().
◆ min_left
| double playerc_laser_t::min_left |
Minimum range, in meters, in the left half of the scan (those ranges from the first beam after the middle of the scan, counterclockwise, to the last beam).
Referenced by PlayerCc::LaserProxy::GetMinLeft().
◆ min_right
| double playerc_laser_t::min_right |
Minimum range, in meters, in the right half of the scan (those ranges from the first beam, counterclockwise, up to the middle of the scan, including the middle beam, if one exists).
Referenced by PlayerCc::LaserProxy::GetMinRight().
◆ point
| player_point_2d_t* playerc_laser_t::point |
Scan data; x, y position (m).
Referenced by PlayerCc::LaserProxy::GetPoint().
◆ pose
| double playerc_laser_t::pose[3] |
Laser geometry in the robot cs: pose gives the position and orientation, size gives the extent.
These values are filled in by playerc_laser_get_geom().
Referenced by PlayerCc::LaserProxy::GetPose().
◆ range_res
| double playerc_laser_t::range_res |
Range resolution, in m.
Referenced by PlayerCc::LaserProxy::GetRangeRes().
◆ ranges
| double* playerc_laser_t::ranges |
Raw range data; range (m).
Referenced by PlayerCc::LaserProxy::GetRange().
◆ scan
| double(* playerc_laser_t::scan)[2] |
Scan data; range (m) and bearing (radians).
Referenced by PlayerCc::LaserProxy::GetBearing().
◆ scan_count
| int playerc_laser_t::scan_count |
Number of points in the scan.
Referenced by PlayerCc::LaserProxy::GetCount(), and PlayerCc::LaserProxy::GetMaxAngle().
◆ scan_res
| double playerc_laser_t::scan_res |
Angular resolution in radians.
Referenced by PlayerCc::LaserProxy::GetMaxAngle(), and PlayerCc::LaserProxy::GetScanRes().
◆ scan_start
| double playerc_laser_t::scan_start |
Start bearing of the scan (radians).
Referenced by PlayerCc::LaserProxy::GetMaxAngle(), and PlayerCc::LaserProxy::GetMinAngle().
◆ scanning_frequency
| double playerc_laser_t::scanning_frequency |
Scanning frequency in Hz.
Referenced by PlayerCc::LaserProxy::GetScanningFrequency().
The documentation for this struct was generated from the following file:
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13