
playerc_bumper_t Struct Reference
Bumper proxy data. More...
#include <playerc.h>
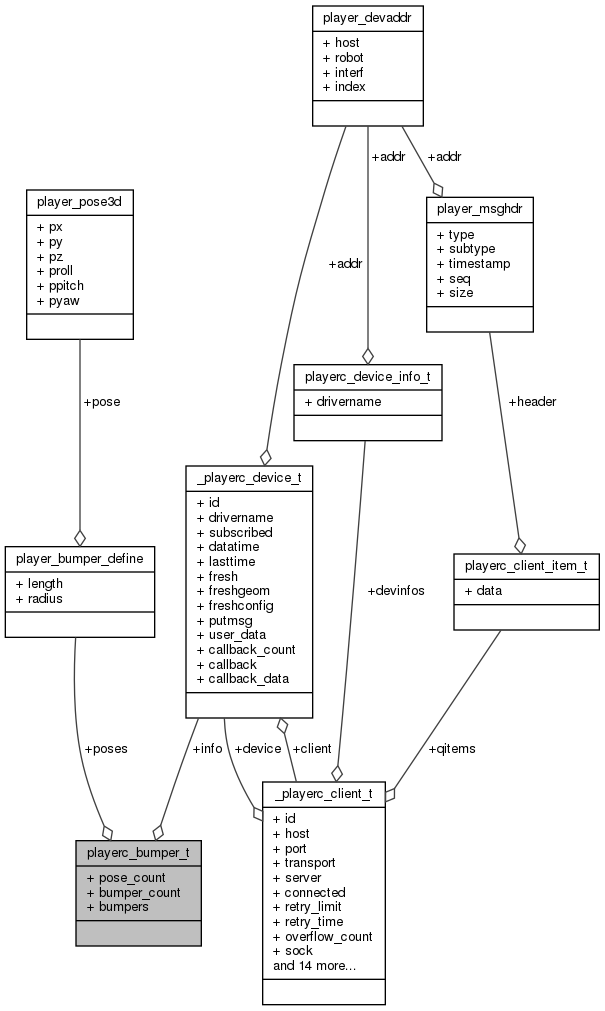
Collaboration diagram for playerc_bumper_t:
Detailed Description
Bumper proxy data.
Public Attributes | |
| playerc_device_t | info |
| Device info; must be at the start of all device structures. More... | |
| int | pose_count |
| Number of pose values. More... | |
| player_bumper_define_t * | poses |
| Pose of each bumper relative to robot (mm, mm, deg, mm, mm). More... | |
| int | bumper_count |
| Number of points in the scan. More... | |
| uint8_t * | bumpers |
| Bump data: unsigned char, either boolean or code indicating corner. More... | |
Member Data Documentation
◆ bumper_count
| int playerc_bumper_t::bumper_count |
Number of points in the scan.
Referenced by PlayerCc::BumperProxy::GetCount().
◆ bumpers
| uint8_t* playerc_bumper_t::bumpers |
Bump data: unsigned char, either boolean or code indicating corner.
Referenced by PlayerCc::BumperProxy::IsBumped().
◆ info
| playerc_device_t playerc_bumper_t::info |
Device info; must be at the start of all device structures.
◆ pose_count
| int playerc_bumper_t::pose_count |
Number of pose values.
Referenced by PlayerCc::BumperProxy::GetPoseCount().
◆ poses
| player_bumper_define_t* playerc_bumper_t::poses |
Pose of each bumper relative to robot (mm, mm, deg, mm, mm).
This structure is filled by calling playerc_bumper_get_geom(). values are x,y (of center) ,normal,length,curvature
Referenced by PlayerCc::BumperProxy::GetPose().
The documentation for this struct was generated from the following file:
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13