
REB Class Reference
Inheritance diagram for REB:

Detailed Description
Definition at line 100 of file reb.h.
Public Member Functions | |
| REB (ConfigFile *cf, int section) | |
| virtual void | Main () |
| Main method for driver thread. | |
| int | ProcessMessage (ClientData *client, player_msghdr *hdr, uint8_t *data, uint8_t *resp_data, size_t *resp_len) |
| virtual int | Subscribe (player_device_id_t id) |
| virtual int | Unsubscribe (player_device_id_t id) |
| virtual int | Setup () |
| Initialize the driver. | |
| virtual int | Shutdown () |
| Finalize the driver. | |
| void | Restart () |
| void | ReadConfig () |
| void | SetOdometry (int, int, short) |
| void | SetIRState (int) |
| void | UpdateData (void) |
| void | UpdateIRData (player_ir_data_t *) |
| void | UpdatePowerData (player_power_data_t *) |
| void | UpdatePosData (player_position_data_t *) |
| void | ConfigAD (int, int) |
| unsigned short | ReadAD (int) |
| void | ReadAllIR (uint16_t *ir) |
| void | SetSpeed (int, int) |
| int | ReadSpeed (int) |
| void | SetPos (int, int) |
| void | SetPosCounter (int, int) |
| int | ReadPos (int) |
| unsigned char | ReadStatus (int, int *, int *) |
| void | ConfigPosPID (int, int, int, int) |
| void | ConfigSpeedPID (int, int, int, int) |
| void | ConfigSpeedProfile (int, int, int) |
Private Member Functions | |
| int | write_serial (char *, int) |
| int | read_serial_until (char *, int, char *, int) |
| int | write_command (char *buf, int len, int maxsize) |
| int | ProcessCommand (player_position_cmd_t *poscmd) |
Private Attributes | |
| player_device_id_t | ir_id |
| player_device_id_t | position_id |
| player_device_id_t | power_id |
| int | ir_subscriptions |
| int | position_subscriptions |
| int | param_index |
| int | reb_fd |
| timeval | last_position |
| bool | refresh_last_position |
| int | last_lpos |
| int | last_rpos |
| int | last_x_f |
| int | last_y_f |
| double | last_theta |
| timeval | last_pos_update |
| timeval | last_power_update |
| timeval | last_ir_update |
| int | pos_update_period |
| int | current_heading |
| short | desired_heading |
| int | ir_sequence |
| timeval | last_ir |
| bool | motors_enabled |
| bool | velocity_mode |
| bool | direct_velocity_control |
| char | reb_serial_port [MAX_FILENAME_SIZE] |
| pollfd write_pfd | read_pfd |
| short | last_trans_command |
| short | last_rot_command |
| int | leftvel |
| int | rightvel |
| int | leftpos |
| int | rightpos |
Member Function Documentation
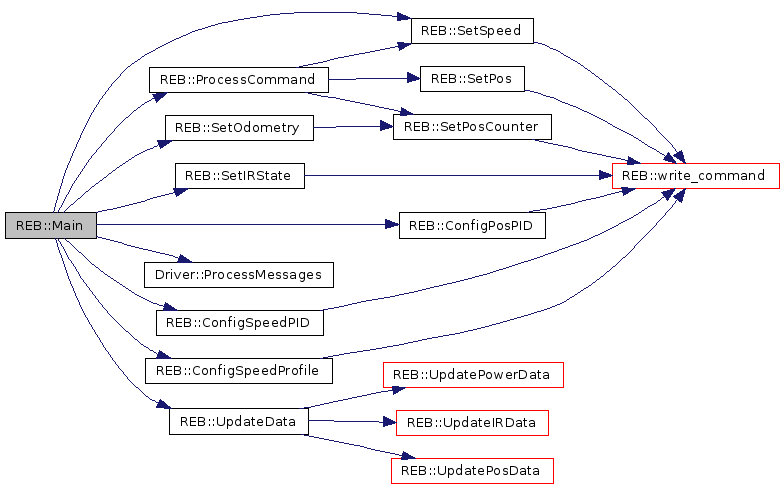
| void REB::Main | ( | ) | [virtual] |
Main method for driver thread.
drivers have their own thread of execution, created using StartThread(); this is the entry point for the driver thread, and must be overloaded by all threaded drivers.
Reimplemented from Driver.
Definition at line 415 of file reb.cc.
References ConfigPosPID(), ConfigSpeedPID(), ConfigSpeedProfile(), ir_subscriptions, PLAYER_MSGTYPE_DATA, position_subscriptions, ProcessCommand(), Driver::ProcessMessages(), UBotRobotParams_t::PulsesPerMMMS, SetIRState(), SetOdometry(), SetSpeed(), and UpdateData().
Here is the call graph for this function:
| int REB::Setup | ( | ) | [virtual] |
Initialize the driver.
This function is called with the first client subscribes; it MUST be implemented by the driver.
- Returns:
- Returns 0 on success.
Implements Driver.
Definition at line 296 of file reb.cc.
References desired_heading, direct_velocity_control, motors_enabled, read_pfd, reb_fd, refresh_last_position, SetIRState(), and velocity_mode.
Here is the call graph for this function:

| int REB::Shutdown | ( | ) | [virtual] |
Finalize the driver.
This function is called with the last client unsubscribes; it MUST be implemented by the driver.
- Returns:
- Returns 0 on success.
Implements Driver.
Definition at line 351 of file reb.cc.
References reb_fd, SetIRState(), SetSpeed(), and Driver::StopThread().
Here is the call graph for this function:

The documentation for this class was generated from the following files: