
LaserTransform Class Reference
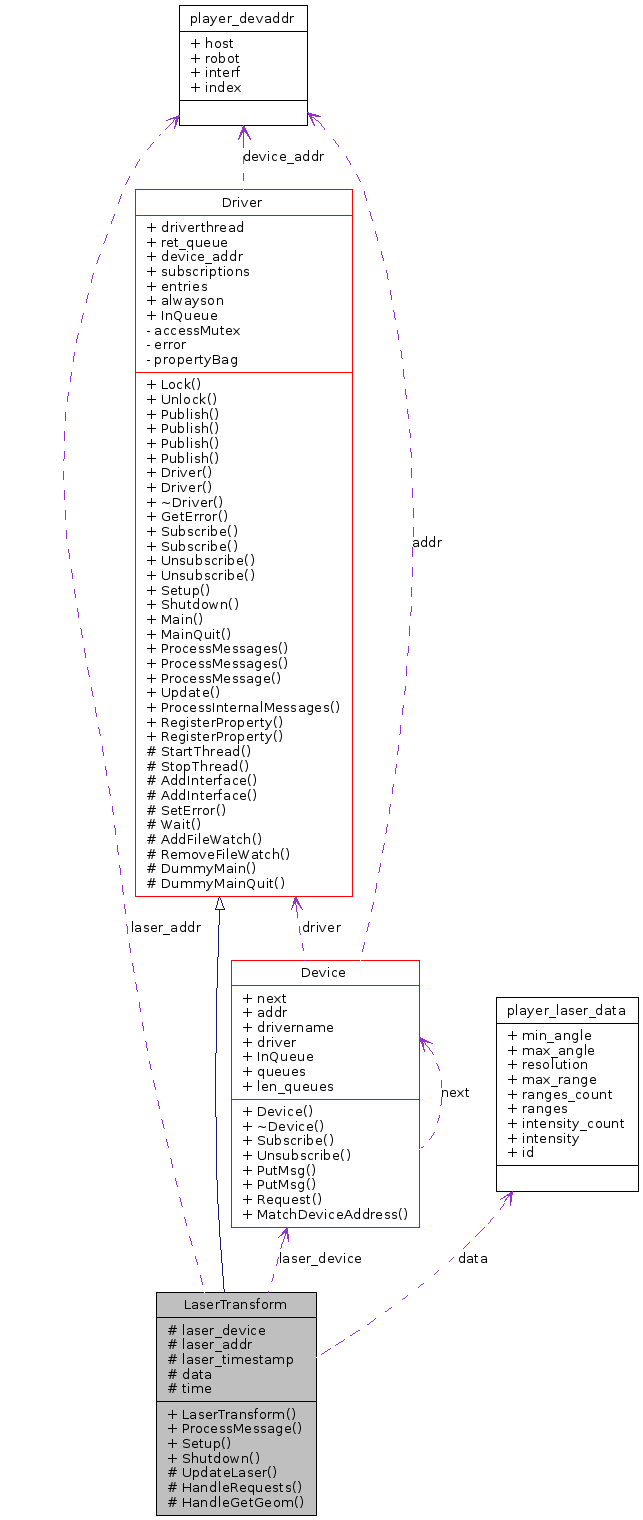
Inheritance diagram for LaserTransform: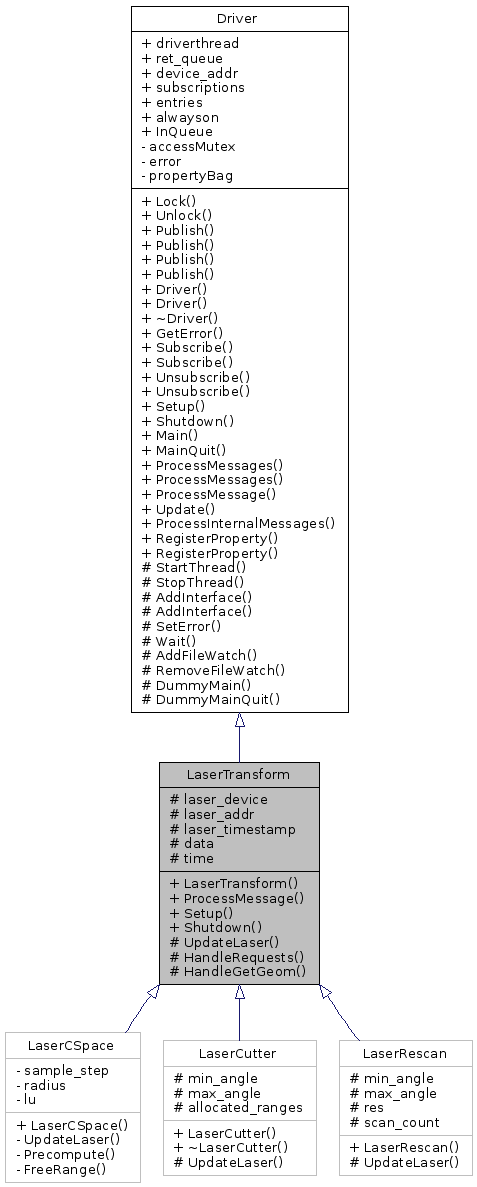
Detailed Description
Definition at line 46 of file lasertransform.h.
Public Member Functions | |
| LaserTransform (ConfigFile *cf, int section) | |
| virtual int | ProcessMessage (QueuePointer &resp_queue, player_msghdr *hdr, void *data) |
| Message handler. | |
| virtual int | Setup () |
| Initialize the driver. | |
| virtual int | Shutdown () |
| Finalize the driver. | |
Protected Member Functions | |
| virtual int | UpdateLaser (player_laser_data_t *data)=0 |
| int | HandleRequests () |
| void | HandleGetGeom (void *client, void *req, int reqlen) |
Protected Attributes | |
| Device * | laser_device |
| player_devaddr_t | laser_addr |
| timeval | laser_timestamp |
| player_laser_data_t | data |
| timeval | time |
Member Function Documentation
| int LaserTransform::ProcessMessage | ( | QueuePointer & | resp_queue, | |
| player_msghdr * | hdr, | |||
| void * | data | |||
| ) | [virtual] |
Message handler.
This function is called once for each message in the incoming queue. Reimplement it to provide message handling. Return 0 if you handled the message and -1 otherwise
- Parameters:
-
resp_queue The queue to which any response should go. hdr The message header data The message body
Reimplemented from Driver.
Definition at line 86 of file lasertransform.cc.
References Driver::device_addr, Driver::InQueue, laser_device, Message::MatchMessage(), PLAYER_LASER_DATA_SCAN, PLAYER_MSGTYPE_DATA, PLAYER_MSGTYPE_REQ, PLAYER_MSGTYPE_RESP_ACK, PLAYER_MSGTYPE_RESP_NACK, Driver::Publish(), Device::PutMsg(), and Driver::ret_queue.
Here is the call graph for this function:
| int LaserTransform::Setup | ( | ) | [virtual] |
Initialize the driver.
This function is called with the first client subscribes; it MUST be implemented by the driver.
- Returns:
- Returns 0 on success.
Implements Driver.
Definition at line 52 of file lasertransform.cc.
References Device::MatchDeviceAddress(), and PLAYER_ERROR.
Here is the call graph for this function:
| int LaserTransform::Shutdown | ( | ) | [virtual] |
Finalize the driver.
This function is called with the last client unsubscribes; it MUST be implemented by the driver.
- Returns:
- Returns 0 on success.
Implements Driver.
Definition at line 76 of file lasertransform.cc.
References laser_device, and Device::Unsubscribe().
Here is the call graph for this function:
The documentation for this class was generated from the following files: