
Position1d device data. More...
#include <playerc.h>
Detailed Description
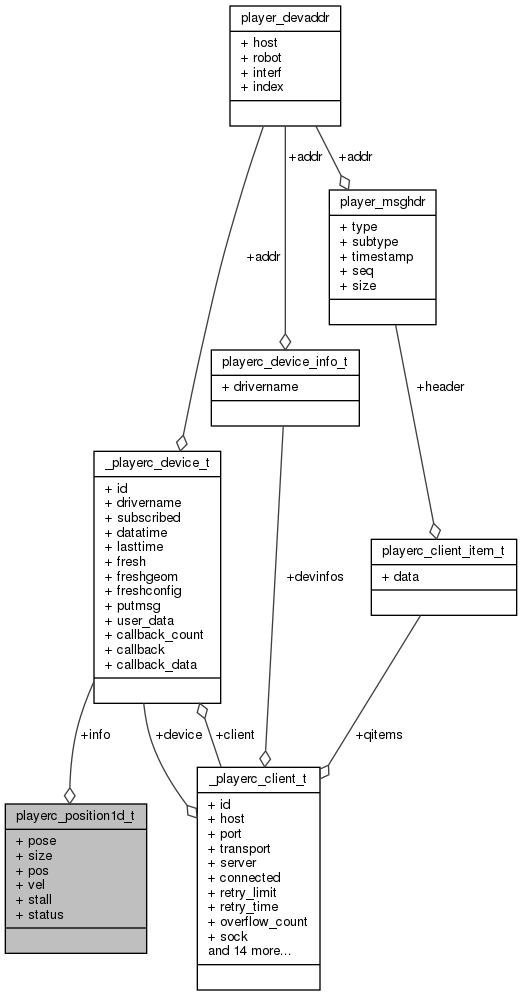
Position1d device data.
Public Attributes | |
| playerc_device_t | info |
| Device info; must be at the start of all device structures. More... | |
| double | pose [3] |
| Robot geometry in robot cs: pose gives the position1d and orientation, size gives the extent. More... | |
| double | size [2] |
| double | pos |
| Odometric pose [m] or [rad]. More... | |
| double | vel |
| Odometric velocity [m/s] or [rad/s]. More... | |
| int | stall |
| Stall flag [0, 1]. More... | |
| int | status |
| Status bitfield of extra data in the following order: More... | |
Member Data Documentation
◆ info
| playerc_device_t playerc_position1d_t::info |
Device info; must be at the start of all device structures.
◆ pos
| double playerc_position1d_t::pos |
Odometric pose [m] or [rad].
Referenced by PlayerCc::Position1dProxy::GetPos().
◆ pose
| double playerc_position1d_t::pose[3] |
Robot geometry in robot cs: pose gives the position1d and orientation, size gives the extent.
These values are filled in by playerc_position1d_get_geom().
Referenced by PlayerCc::Position1dProxy::GetPose().
◆ stall
| int playerc_position1d_t::stall |
Stall flag [0, 1].
Referenced by PlayerCc::Position1dProxy::GetStall().
◆ status
| int playerc_position1d_t::status |
Status bitfield of extra data in the following order:
- status (unsigned byte)
- bit 0: limit min
- bit 1: limit center
- bit 2: limit max
- bit 3: over current
- bit 4: trajectory complete
- bit 5: is enabled
- bit 6:
- bit 7:
Referenced by PlayerCc::Position1dProxy::GetStatus(), PlayerCc::Position1dProxy::IsEnabled(), PlayerCc::Position1dProxy::IsLimitCen(), PlayerCc::Position1dProxy::IsLimitMax(), PlayerCc::Position1dProxy::IsLimitMin(), PlayerCc::Position1dProxy::IsOverCurrent(), and PlayerCc::Position1dProxy::IsTrajComplete().
◆ vel
| double playerc_position1d_t::vel |
Odometric velocity [m/s] or [rad/s].
Referenced by PlayerCc::Position1dProxy::GetVel().
The documentation for this struct was generated from the following file:
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13