
Public Member Functions | |
| uint16_t | CalcChkSum () |
| CalcChkSum. | |
| void | Print () |
| Copyright (C) 2010 Ana Teresa Hernández Malagón Movirobotics Copyright (C) 2006 Videre Design Copyright (C) 2000 Brian Gerkey, Kasper Stoy, Richard Vaughan, & Andrew Howard. More... | |
| void | PrintHex () |
| PrintHex. | |
| int | Build (unsigned char *data, unsigned char datasize) |
| Build. | |
| int | Send (int fd) |
| Send. | |
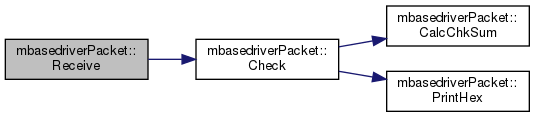
| int | Receive (int fd, uint16_t wait=30) |
| Receive. More... | |
| bool | Check () |
| Check. | |
| bool | operator!= (mbasedriverPacket p) |
Public Attributes | |
| unsigned char | packet [PACKET_LEN] |
| unsigned char | size |
Member Function Documentation
◆ Print()
| void mbasedriverPacket::Print | ( | ) |
Copyright (C) 2010 Ana Teresa Hernández Malagón Movirobotics Copyright (C) 2006 Videre Design Copyright (C) 2000 Brian Gerkey, Kasper Stoy, Richard Vaughan, & Andrew Howard.
Videre Erratic robot driver for Player
This program is free software; you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation; either version 2 of the License, or (at your option) any later version.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program; if not, write to the Free Software Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA Movirobotic's mBase robot driver for Player 3.0.1 based on erratic driver developed by Brian Gerkey, Kasper Stoy, Richard Vaughan, & Andrew Howard. Developed by Ana Teresa Herández Malagón. Print
Referenced by mbasedriver::ReceiveThread(), and mbasedriver::SendThread().
◆ Receive()
| int mbasedriverPacket::Receive | ( | int | fd, |
| uint16_t | wait = 30 |
||
| ) |
Receive.
- You can supply a timeout in milliseconds
References Check().
Referenced by mbasedriver::Connect(), and mbasedriver::ReceiveThread().
The documentation for this class was generated from the following files:
- mbase/packet.h
- mbase/packet.cc
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13