
playerc_ranger_t Struct Reference
[ranger]
#include <playerc.h>
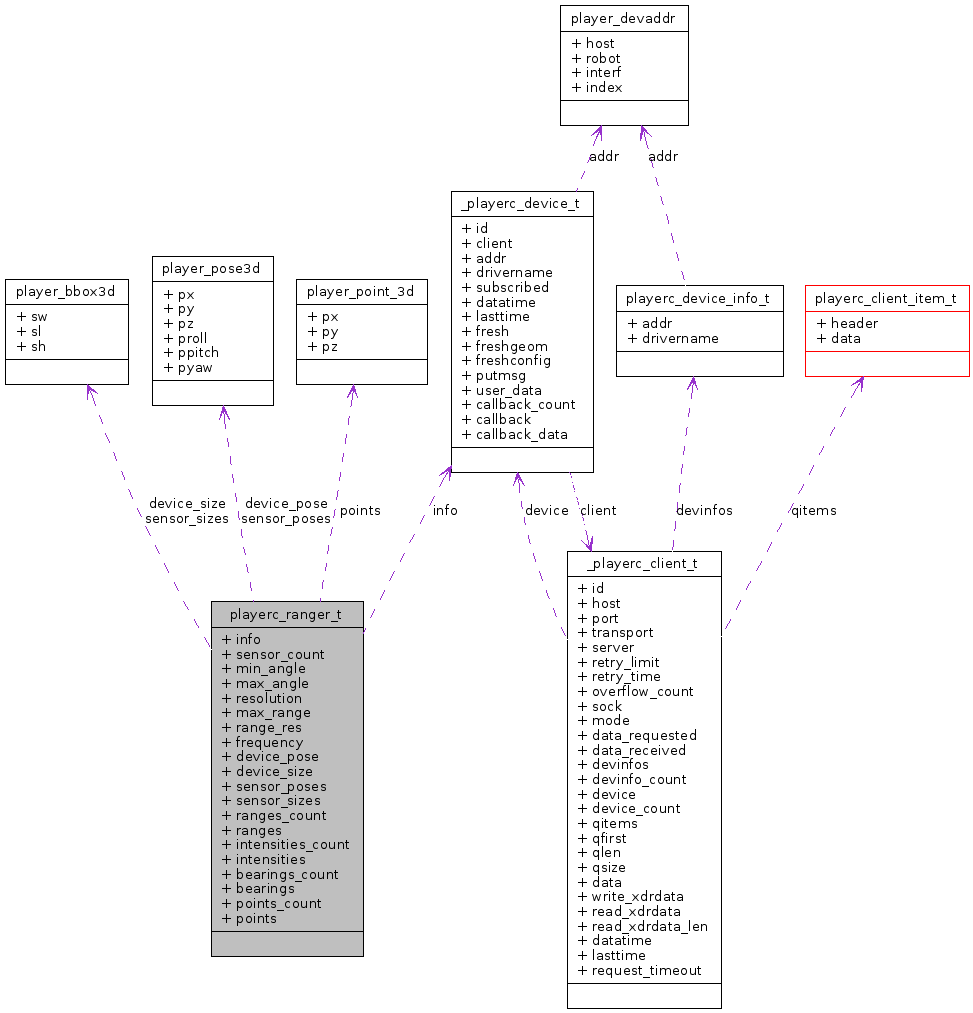
Collaboration diagram for playerc_ranger_t:
Detailed Description
Ranger proxy data.
Definition at line 2943 of file playerc.h.
Public Attributes | |
| playerc_device_t | info |
| Device info; must be at the start of all device structures. | |
| uint32_t | sensor_count |
| Number of individual range sensors in the device. | |
| double | min_angle |
| Start angle of scans [rad]. | |
| double | max_angle |
| End angle of scans [rad]. | |
| double | resolution |
| Scan resolution [rad]. | |
| double | max_range |
| Maximum range [m]. | |
| double | range_res |
| Range resolution [m]. | |
| double | frequency |
| Scanning frequency [Hz]. | |
| player_pose3d_t | device_pose |
| Device geometry in the robot CS: pose gives the position and orientation, size gives the extent. | |
| player_bbox3d_t | device_size |
| player_pose3d_t * | sensor_poses |
| Geometry of each individual range sensor in the device (e.g. | |
| player_bbox3d_t * | sensor_sizes |
| uint32_t | ranges_count |
| Number of individual ranges in a scan. | |
| double * | ranges |
| Range data [m]. | |
| uint32_t | intensities_count |
| Number of individual intensities in a scan. | |
| double * | intensities |
| Intensity data [m]. | |
| uint32_t | bearings_count |
| Number of individual scan bearings. | |
| double * | bearings |
| Scan bearings [radians]. | |
| uint32_t | points_count |
| Number of scan points. | |
| player_point_3d_t * | points |
| Scan points (x, y, z). | |
Member Data Documentation
| double playerc_ranger_t::min_angle |
| double playerc_ranger_t::max_angle |
| double playerc_ranger_t::resolution |
| double playerc_ranger_t::max_range |
| double playerc_ranger_t::range_res |
| double playerc_ranger_t::frequency |
Device geometry in the robot CS: pose gives the position and orientation, size gives the extent.
These values are filled in by calling playerc_ranger_get_geom(), or from pose-stamped data.
Geometry of each individual range sensor in the device (e.g.
a single sonar sensor in a sonar array). These values are filled in by calling playerc_ranger_get_geom(), or from pose-stamped data.
| double* playerc_ranger_t::intensities |
The documentation for this struct was generated from the following file: