
playerc_gripper_t Struct Reference
[gripper]
#include <playerc.h>
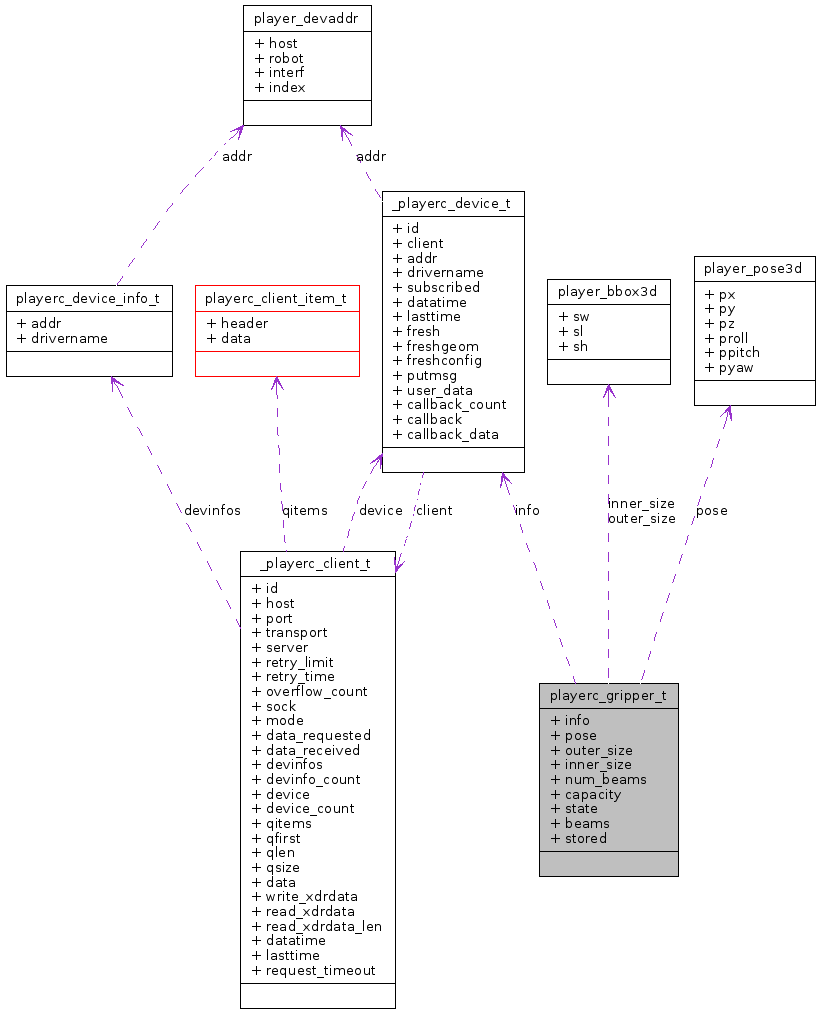
Collaboration diagram for playerc_gripper_t:
Detailed Description
Gripper device data.
Definition at line 1715 of file playerc.h.
Public Attributes | |
| playerc_device_t | info |
| Device info; must be at the start of all device structures. | |
| player_pose3d_t | pose |
| Gripper geometry in the robot cs: pose gives the position and orientation, outer_size gives the extent when open inner_size gives the size of the space between the open fingers These values are initially zero, but can be filled in by calling playerc_gripper_get_geom(). | |
| player_bbox3d_t | outer_size |
| player_bbox3d_t | inner_size |
| uint8_t | num_beams |
| The number of breakbeams the gripper has. | |
| uint8_t | capacity |
| The capacity of the gripper's store - if 0, the gripper cannot store. | |
| uint8_t | state |
| The gripper's state: may be one of PLAYER_GRIPPER_STATE_OPEN, PLAYER_GRIPPER_STATE_CLOSED, PLAYER_GRIPPER_STATE_MOVING or PLAYER_GRIPPER_STATE_ERROR. | |
| uint32_t | beams |
| The position of the object in the gripper. | |
| uint8_t | stored |
| The number of currently-stored objects. | |
The documentation for this struct was generated from the following file: