
player_gripper_geom Struct Reference
#include <player_interfaces.h>
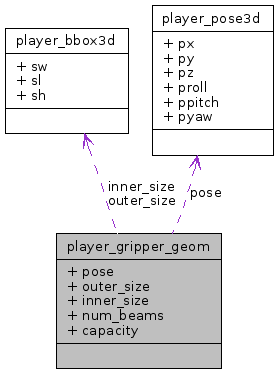
Collaboration diagram for player_gripper_geom:
Detailed Description
Request/reply: get geometry.The geometry (pose, outer size and inner size) of the gripper device can be queried by sending a null PLAYER_GRIPPER_REQ_GET_GEOM request.
Definition at line 2389 of file player_interfaces.h.
Public Attributes | |
| player_pose3d_t | pose |
| Gripper pose, in robot cs (m, m, m, rad, rad, rad). | |
| player_bbox3d_t | outer_size |
| Outside dimensions of gripper (m, m, m). | |
| player_bbox3d_t | inner_size |
| Inside dimensions of gripper, i.e. | |
| uint8_t | num_beams |
| Number of breakbeams the gripper has. | |
| uint8_t | capacity |
| Capacity for storing objects - if 0, then the gripper can't store. | |
Member Data Documentation
Inside dimensions of gripper, i.e.
the size of the space between the fingers when they are fully open (m, m, m)
Definition at line 2397 of file player_interfaces.h.
Referenced by P2OS::HandleConfig().
The documentation for this struct was generated from the following file: