
Nav200 Class Reference
Collaboration diagram for Nav200: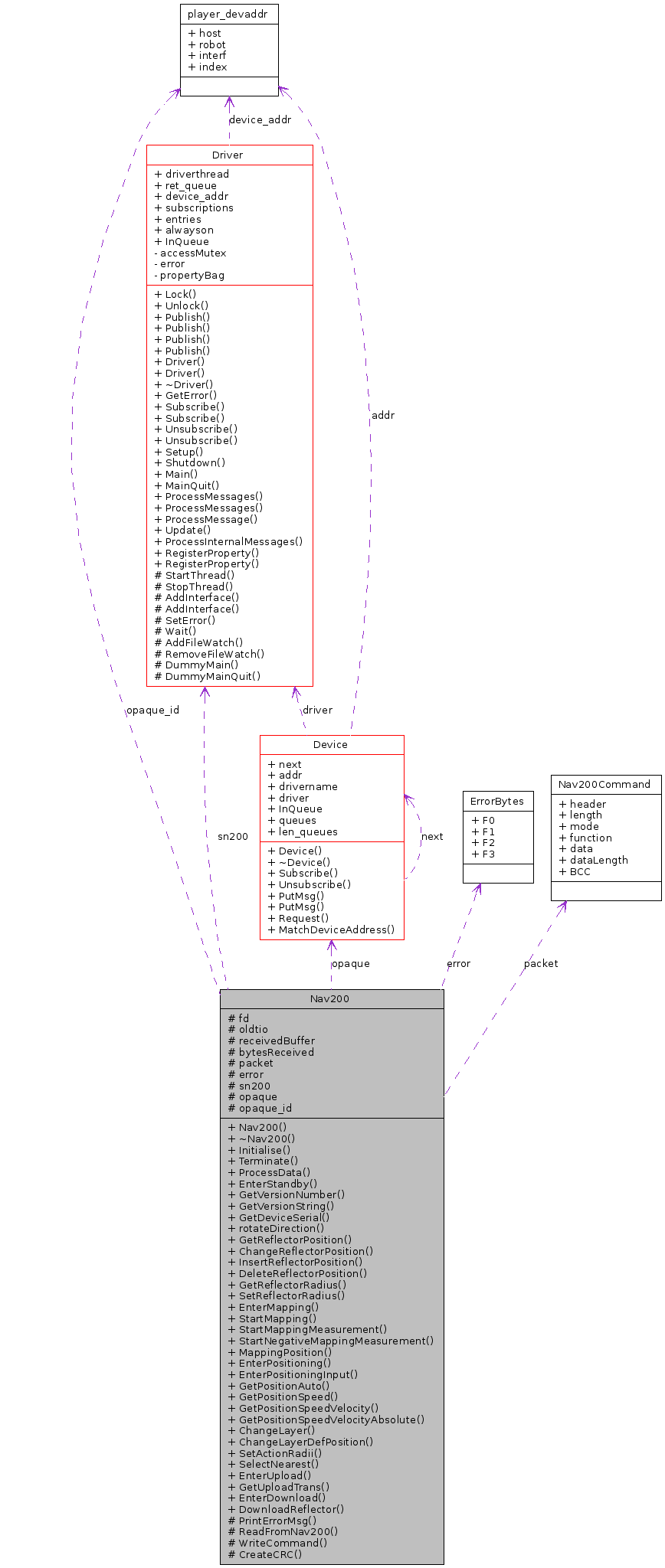
Detailed Description
Definition at line 86 of file nav200.h.
Public Member Functions | |
| Nav200 () | |
| ~Nav200 () | |
| int | Initialise (Driver *device, Device *opaque, player_devaddr_t opaque_id) |
| int | Terminate () |
| int | ProcessData () |
| bool | EnterStandby () |
| int | GetVersionNumber () |
| char * | GetVersionString () |
| short | GetDeviceSerial () |
| bool | rotateDirection (uint8_t direction) |
| bool | GetReflectorPosition (uint8_t layer, uint8_t number, PositionXY &reflector) |
| bool | ChangeReflectorPosition (uint8_t layer, uint8_t number, int newX, int newY) |
| bool | InsertReflectorPosition (uint8_t layer, uint8_t number, int X, int Y) |
| bool | DeleteReflectorPosition (uint8_t layer, uint8_t number, PositionXY &reflector) |
| int | GetReflectorRadius (uint8_t layer) |
| bool | SetReflectorRadius (uint8_t layer, uint8_t radius) |
| bool | EnterMapping () |
| int | StartMapping (uint8_t layer, int X, int Y, short orientation, uint8_t radius) |
| int | StartMappingMeasurement (uint8_t layer, uint8_t scans, int X, int Y, short orientation, uint8_t radius) |
| int | StartNegativeMappingMeasurement (uint8_t layer, uint8_t scans, int X, int Y, short orientation, uint8_t radius) |
| bool | MappingPosition (uint8_t layer, uint8_t number, PositionXY &reflector) |
| bool | EnterPositioning () |
| bool | EnterPositioningInput (uint8_t NumberOfMeasurements) |
| bool | GetPositionAuto (LaserPos &laserPosition) |
| bool | GetPositionSpeed (short speedX, short speedY, LaserPos &laserPosition) |
| bool | GetPositionSpeedVelocity (short speedX, short speedY, short velocity, LaserPos &laserPosition) |
| bool | GetPositionSpeedVelocityAbsolute (short speedX, short speedY, short velocity, LaserPos &laserPosition) |
| bool | ChangeLayer (uint8_t layer) |
| bool | ChangeLayerDefPosition (uint8_t layer, int X, int Y, short orientation) |
| bool | SetActionRadii (int min, int max) |
| bool | SelectNearest (uint8_t N_nearest) |
| bool | EnterUpload () |
| bool | GetUploadTrans (uint8_t layer, ReflectorData &reflector) |
| bool | EnterDownload () |
| bool | DownloadReflector (uint8_t layer, uint8_t number, int X, int Y) |
Protected Member Functions | |
| void | PrintErrorMsg (void) |
| int | ReadFromNav200 (int timeout_usec=5000000) |
| int | WriteCommand (char mode, char function, int dataLength, uint8_t *data) |
| uint8_t | CreateCRC (uint8_t *data, ssize_t len) |
Protected Attributes | |
| int | fd |
| termios | oldtio |
| uint8_t | receivedBuffer [BUFFER_SIZE] |
| int | bytesReceived |
| Nav200Command | packet |
| ErrorBytes | error |
| Driver * | sn200 |
| Device * | opaque |
| player_devaddr_t | opaque_id |
The documentation for this class was generated from the following files: