
Claser implements functions to read data from a laser scanner ROTOSCAN RS4-4 (Leuze corp.) connected to a serial port. More...
#include <RS4Leuze_laser.h>
Detailed Description
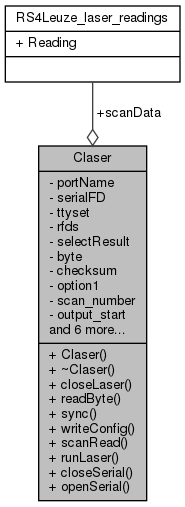
Claser implements functions to read data from a laser scanner ROTOSCAN RS4-4 (Leuze corp.) connected to a serial port.
Public Member Functions | |
| Claser (int scan_points) | |
| Opens serial port. More... | |
| ~Claser () | |
| Destructor. | |
| void | closeLaser () |
| Closes serial Port and data file. | |
| unsigned char | readByte () |
| Reads one byte and updates checksum message. More... | |
| void | sync () |
| sync function synchronizes with the start of the laser data | |
| void | writeConfig () |
| Write configuration parameters to laser scanner device. | |
| int | scanRead () |
| reads one scan and puts it in scanData array More... | |
| void | runLaser () |
| Return the scan reading from the laser. | |
| void | closeSerial () |
| Closes serial Port. | |
| void | openSerial (bool *laser_ON, int Baud_rate, const char *Port) |
| Opens serial Port and get the default paarameters or those given in the .cfg file. | |
Public Attributes | |
| RS4Leuze_laser_readings_t | scanData |
Private Attributes | |
| char * | portName |
| Serial Port where laser is connected. | |
| int | serialFD |
| Serial port file descriptor. | |
| termios | ttyset |
| termios variable to configure serial port | |
| fd_set | rfds |
| int | selectResult |
| Laser Message fields. | |
| unsigned char | byte |
| unsigned char | checksum |
| unsigned char | option1 |
| long unsigned int | scan_number |
| unsigned int | output_start |
| unsigned int | output_stop |
| unsigned int | scanedPoint |
| unsigned char | controlByte |
| unsigned int | points_to_scan |
| struct timeval | tv |
| termios variable time interval | |
| timeval | timeStamp |
| Time in microseconds resolution. | |
Constructor & Destructor Documentation
◆ Claser()
| Claser::Claser | ( | int | scan_points | ) |
Opens serial port.
laser.cpp V 2.0 -> RS4Leuze_laser.cpp
Modified by Ernesto Homar Teniente Aviles Date 20 APril 2007 Default constructor.
Member Function Documentation
◆ readByte()
| unsigned char Claser::readByte | ( | ) |
Reads one byte and updates checksum message.
Reads one byte from serialFD and updates checksum.
References serialFD.
Referenced by scanRead().
◆ scanRead()
| int Claser::scanRead | ( | ) |
reads one scan and puts it in scanData array
scanRead reads a whole message of a laser scan, loads it to scanData vector and prints it to laserDataFile.
If success returns 0 and returns 1 if failure.
References PLAYER_ERROR, readByte(), and serialFD.
Referenced by runLaser().

The documentation for this class was generated from the following files:
- RS4Leuze_laser.h
- RS4Leuze_laser.cc
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13