
playerc_position2d_t Struct Reference
[position2d]
#include <playerc.h>
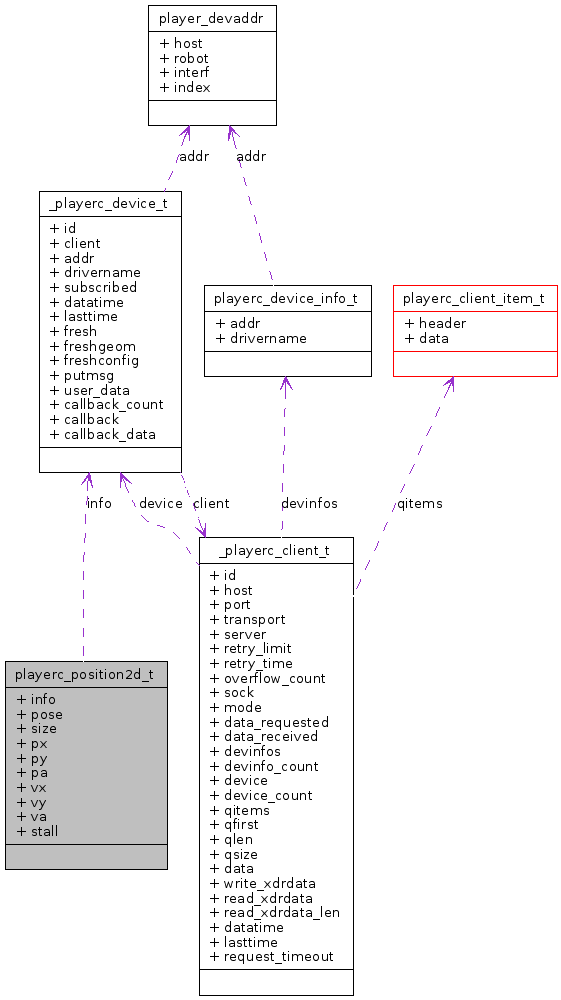
Collaboration diagram for playerc_position2d_t:
Detailed Description
Position2d device data.
Definition at line 2614 of file playerc.h.
Public Attributes | |
| playerc_device_t | info |
| Device info; must be at the start of all device structures. | |
| double | pose [3] |
| Robot geometry in robot cs: pose gives the position2d and orientation, size gives the extent. | |
| double | size [2] |
| double | px |
| Odometric pose (m, m, rad). | |
| double | py |
| double | pa |
| double | vx |
| Odometric velocity (m/s, m/s, rad/s). | |
| double | vy |
| double | va |
| int | stall |
| Stall flag [0, 1]. | |
Member Data Documentation
| double playerc_position2d_t::pose[3] |
Robot geometry in robot cs: pose gives the position2d and orientation, size gives the extent.
These values are filled in by playerc_position2d_get_geom().
Definition at line 2622 of file playerc.h.
Referenced by PlayerCc::Position2dProxy::GetOffset().
The documentation for this struct was generated from the following file: