
Send and receive messages from e-puck. More...
#include <serialPort.hpp>
Detailed Description
Send and receive messages from e-puck.
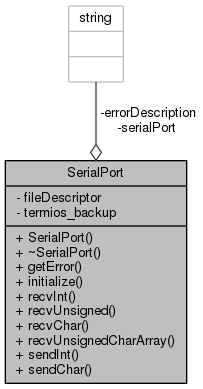
This class connects and communicates with the e-puck robot through the serial interface. Only one instance must be created and shared among the device interfaces.
- Warning
- Not thread safe
- Date
- August 2008
Public Member Functions | |
| SerialPort (std::string &serialPort) | |
| Constructor of SerialPort class. More... | |
| std::string | getError () const |
| Return the last error. More... | |
| int | initialize () |
| Open the serial port device and set the configurations for it. | |
| int | recvInt () const |
| Receive a signed interger from e-puck. More... | |
| unsigned | recvUnsigned () const |
| Receive an unsigned interger from e-puck. More... | |
| char | recvChar () const |
| Receive a char from e-puck. More... | |
| int | recvUnsignedCharArray (unsigned char *const array, unsigned length) const |
| Receive an array of unsigned char from e-puck. More... | |
| void | sendInt (int message) const |
| Send an integer to e-puck. More... | |
| void | sendChar (char message) const |
| Send a character to e-puck. More... | |
Private Attributes | |
| int | fileDescriptor |
| std::string | serialPort |
| std::string | errorDescription |
| struct termios | termios_backup |
Constructor & Destructor Documentation
◆ SerialPort()
| SerialPort::SerialPort | ( | std::string & | serialPort | ) |
Constructor of SerialPort class.
This constructor only creates the object, it don't open or initialize the serial port device.
- Parameters
-
serialPort A absolute path for the serial port device (e.g. "/dev/rfcomm0").
Member Function Documentation
◆ getError()
|
inline |
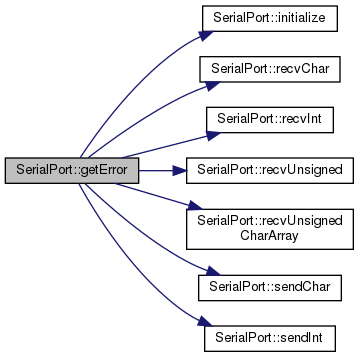
Return the last error.
Return the description of last error.
- Returns
- A std::string describing the error.
References initialize(), recvChar(), recvInt(), recvUnsigned(), recvUnsignedCharArray(), sendChar(), and sendInt().
◆ recvChar()
| char SerialPort::recvChar | ( | ) | const |
Receive a char from e-puck.
Wait indefinitely one byte to arrive from e-puck and converts them to char.
- Returns
- The received char.
Referenced by EpuckLEDs::EpuckLEDs(), getError(), EpuckCamera::Initialize(), EpuckPosition2d::SetVel(), and EpuckPosition2d::StopMotors().
◆ recvInt()
| int SerialPort::recvInt | ( | ) | const |
Receive a signed interger from e-puck.
Wait indefinitely two bytes to arrive from e-puck and converts them to signed integer.
- Returns
- The received signed integer.
Referenced by getError(), EpuckIR::GetIRData(), EpuckPosition2d::SetOdometry(), and EpuckPosition2d::UpdateOdometry().
◆ recvUnsigned()
| unsigned SerialPort::recvUnsigned | ( | ) | const |
Receive an unsigned interger from e-puck.
Wait indefinitely two bytes to arrive from e-puck and converts them to unsigned integer.
- Returns
- The received unsigned integer.
Referenced by getError(), and EpuckCamera::Initialize().
◆ recvUnsignedCharArray()
| int SerialPort::recvUnsignedCharArray | ( | unsigned char *const | array, |
| unsigned | length | ||
| ) | const |
Receive an array of unsigned char from e-puck.
- Parameters
-
array Pointer to array where the received char will be put. length Length of array that will be received.
Referenced by getError(), and EpuckCamera::GetImage().
◆ sendChar()
| void SerialPort::sendChar | ( | char | message | ) | const |
Send a character to e-puck.
Send one character to e-puck.
- Parameters
-
message The charecter to be sent.
Referenced by EpuckInterface::EpuckInterface(), EpuckLEDs::EpuckLEDs(), and getError().
◆ sendInt()
| void SerialPort::sendInt | ( | int | message | ) | const |
Send an integer to e-puck.
Send two bytes to e-puck. It's an integer number up to 65535.
- Parameters
-
message The integer to be sent.
Referenced by getError(), EpuckCamera::Initialize(), and EpuckPosition2d::SetVel().
The documentation for this class was generated from the following files:
- serialPort.hpp
- serialPort.cpp
Generated on Wed Sep 2 2020 16:39:30 for Player by
 1.8.13
1.8.13