
lasercspace
[Drivers]
The lasercspace driver processes a laser scan to compute the configuration space (`C-space') boundary. That is, it shortens the range of each laser scan such that the resultant scan delimits the obstacle-free portion of the robot's configuration space. This driver is particular useful for writing obstacle avoidance algorithms, since the robot may safely move to any point in the obstacle-free portion of the configuration space.Note that driver computes the configuration space for a robot of some fixed radius; this radius may be set in the configuration file.
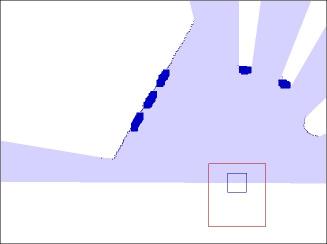
Standard laser scan
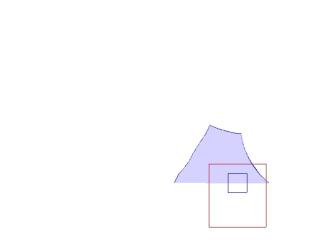
Corresponding C-space scan for a robot of 0.5 m
- Compile-time dependencies
- none
- Provides
- laser : output of the C-space scan
- Requires
- laser : raw laser data from which to make C-space scan
- Configuration requests
- PLAYER_LASER_REQ_GET_GEOM
- Configuration file options
- radius (length)
- Default: 0.5 m
- Radius of robot for which to make C-space scan
- step (integer)
- Default: 1
- Step size for subsampling the scan (saves CPU cycles)
- Example
driver ( name "sicklms200" provides ["laser:0"] port "/dev/ttyS0" ) driver ( name "lasercspace" requires ["laser:0"] # read from laser:0 provides ["laser:1"] # output results on laser:1 radius 0.5 )
- Author:
- Andrew Howard