|
| |
| Home | |
| FAQ | |
| Player | |
| Utilities | |
| Stage | |
| Gazebo | |
| Contrib | |
| Documentation | |
| Publications | |
| Contributors | |
| Users |
| Project |
| Download |
| Bugs/Feedback |
| Mailing lists |
| Radish |
| Old news |
| Old stuff |
Player Visualization tools
For the purposes of visualizing robot sensor data, we currently provide two graphical tools: tkviewer and playerv, summarized below. Both tools are available in the Player distribution, and will be installed in the bin directory alongside the Player server.
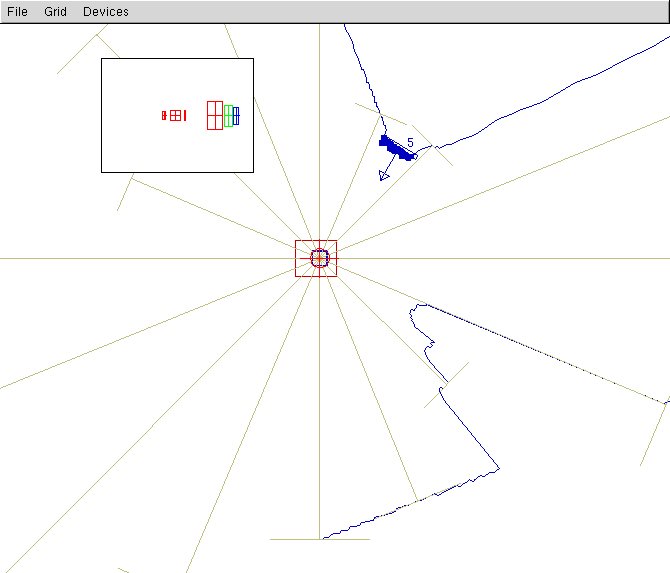
playerv
playerv is a Player visualization tool written in pure ANSI C, and uses the libplayerc client package and the RTK graphics library (both also included with Player). playerv will visualize data from most Player devices, and allows you to control the position and ptz devices. The presentation format very much resembles that of Stage.A sample screenshot:
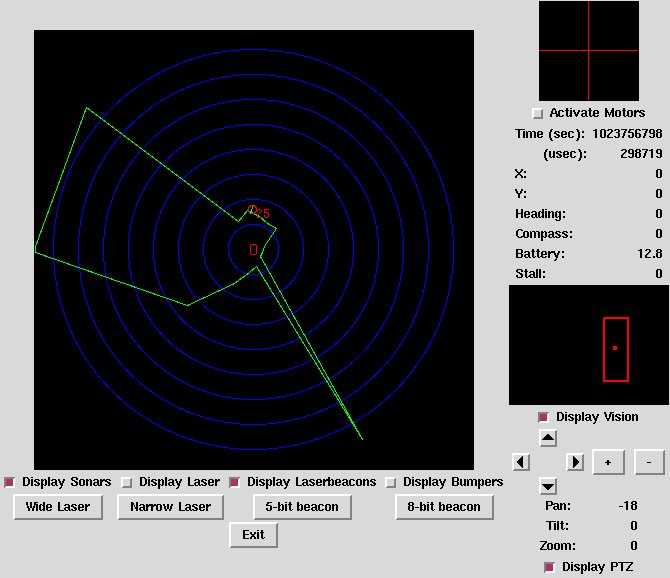
tkviewer
tkviewer is a Player visualization tool written in Tcl/Tk, which uses the Tclplayer client package (also included with Player). tkviewer can visualize data from most Player devices, and allows you to control the position and ptz devices.A sample screenshot: