 |
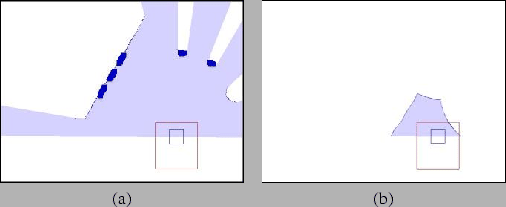
The lasercspace driver processes a laser scan to compute the configuration space (`C-space') boundary. That is, it shortens the range of each laser scan such that the resultant scan delimits the obstacle-free portion of the robot's configuration space. This driver is particular useful for writing obstacle avoidance algorithms, since the robot may safely move to any point in the obstacle-free portion of the configuration space.
Note that driver computes the configuration space for a robot of some fixed radius; this radius may be set in the configuration file.
Supported interfaces:
Required devices:
Supported configuration requests:
PLAYER_LASER_GET_GEOM
| Name | Type | Default | Meaning |
laser | integer | 0 | Index of the laser device to use. |
radius | length | 0.50 | Robot radius. |