



Next: 8.2 Adding a new
Up: 8. Architecture
Previous: 8. Architecture
Contents
Subsections
Player is implemented in C++ and makes use of the POSIX-compliant
pthread interface for writing multi-threaded programs. Initially, Player
was written with a very large number of threads (2 per client + 1 per device);
we found this model to be rather inefficient (especially with LinuxThreads)
and poorly scalable due to scheduler delay and context switch time.
Thus we have eliminated many threads, keeping the total thread count
constant in the number of clients. To support code modularity and reusability
there is still generally one thread per device, though some light-weight
devices (e.g., the laserbeacon device) do not require their own
threads.
One thread services all clients, doing the following:
listen for new client connections on the selected TCP port(s),
read commands and requests from all current clients,
and write data and replies to all clients.
When the server receives a request for a device that is not already setup,
it calls the proper method, Setup(), in the object which controls the
indicated device. The invocation of Setup() involves spawning another
thread to communicate with that device8.1. So, in total, we have 1 server thread and 1 thread
per open device.
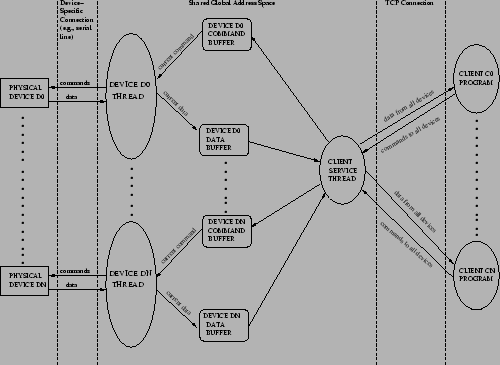
The overall system structure of Player is shown in Figure 8.1.
The center portion of the figure is Player itself; on the left are the physical
devices and on the right are the clients. As described above, each client
has a TCP socket connection to Player. If the client is executing on the same
host as Player, then this socket is simply a loopback connection; otherwise,
there is a physical network in between the two. At the other end, Player
connects to each device by whatever method is appropriate for that device.
For most devices, including the laser, camera, and robot microcontroller,
Player makes this connection via an RS-232 serial line. However, connections
to the ACTS vision server and Festival speech synthesizer are via a TCP socket.
Within Player, the various threads communicate through a shared global
address space. As indicated in Figure 8.1, each
device has associated with it a command buffer and a data buffer.
These buffers, which are each protected by mutual exclusion locks,
provide an asynchronous communication channel between the device
threads and the client reader and writer threads. For example, when
the client reader thread receives a new command for a device,
it writes the command into the command buffer for that device. At
some later point in time, when the device thread is ready for a new
command, it will read the command from its command buffer and send
it on to the device. Analogously, when a device thread receives
new data from its device, it writes the data into its data
buffer. Later, when the client writer thread is ready to send new
data from that device to a particular client, it reads the data from the data
buffer and passes it on to the client. In this way, the client
service thread is decoupled from the device service threads (and
thus the clients are decoupled from the devices). Also, just by the
nature of threads, the devices are decoupled from each other.
Figure 8.1:
Overall system architecture of Player
 |
By default, each client will receive new data from each device to which it is
subscribed at 10Hz. Of course, receiving data at 10Hz may not be reasonable
for all clients; thus we provide a method for changing the frequency, and
also for placing the server in a request/reply mode. It is important to
remember that even when a client receives data slowly, there is no backlog
and it always receives the most current data; it has simply missed out on
some intervening information. Also, these frequency changes affect the
server's behavior with respect to each client individually; the client at
30Hz and the client at 5Hz can be connected simultaneously, and the server
will feed each one data at its preferred rate.
There are four (per-client) modes of data delivery, as follows:
- PLAYER_DATAMODE_PUSH_ALL : periodically send to the client
current data from all devices currently opened for reading
- PLAYER_DATAMODE_PULL_ALL : on request from the client, send it
current data from all devices currently opened for reading
- PLAYER_DATAMODE_PUSH_NEW : periodically send to the client
current data only from those devices that are opened for reading and
have generated new data since the last cycle
- PLAYER_DATAMODE_PULL_NEW : on request from the client, send it
current data only from those devices that are opened for reading and
have generated new data since the last cycle
The default mode is currently PLAYER_DATAMODE_PUSH_NEW, which many
clients will find most useful. In general, the *PUSH* modes, which
essentially provide continuous streams of data, are good when implementing
simple (or multi-threaded) client programs in which the process will
periodically block on the socket to wait for new data. Likewise, the *PULL* modes are good for client programs that are very slow and/or aperiodic.
Along the other dimension, the *NEW* modes are most efficient, as they
never cause ``old'' data to be sent to the client. However, if a client
program does not cache sensor data locally, then it might prefer to use one
of the *ALL* modes in order to receive all sensor data on every cycle;
in this way the client can operate each cycle on the sensor data in place
as it is received.
Of course, it is possible for a device to generate new data faster than
the client is reading from the server. In particular, there is no method
by which a device can throw an interrupt to signal that it has data ready.
Thus the data received by the client will always be slightly older for having
sat inside the shared data buffer inside Player. This ``buffer sit'' time
can be minimized by increasing the frequency with which the server is sending
data to the client8.2. In any case, all data
is timestamped by the originating device driver, preferably as close to
the time when the data was gathered from the device. This data timestamp
is generally a very close approximation to the time at which the sensed
phenomenon occurred and can be used by client programs requiring (fairly)
precise timing information.
Analogous to the issue of data freshness is the fact that there is no guarantee
that a command given by a client will ever be sent to the intended physical
device. Player does not implement any device locking, so when multiple
clients are connected to a Player server, they can simultaneously write into
a single device's command buffer. There is no queuing of commands, and each
new command will overwrite the old one; the service thread for the device
will only send to the device itself whatever command it finds each time
it reads its command buffer. We chose not to implement locking in order
to provide maximal power and flexibility to the client programs. In our
view, if multiple clients are concurrently controlling a single device,
such as a robot's wheels, then those clients are probably cooperative,
in which case they should implement their own arbitration mechanism at a
higher level than Player. If the clients are not cooperative, then the
subject of research is presumably the interaction of competitive agents,
in which case device locking would be a hindrance.
Whereas the data and command for each device are stored in simple buffers that
are successively overwritten, configuration requests and replies are stored
in queues. Configuration requests, which are sent from client to server,
are stored in the device's incoming queue. Configuration replies, which
are sent from server to client, are stored in the device's outgoing queue.
These queues are fixed-size: queue element size is currently fixed at 1KB
for all devices and queue length is determined at compile-time by each
device's contructor.
Next: 8.2 Adding a new
Up: 8. Architecture
Previous: 8. Architecture
Contents
2004-06-02