
player_gripper_geom Struct Reference
Request/reply: get geometry. More...
#include <player_interfaces.h>
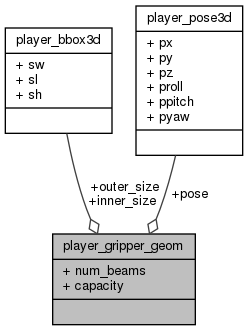
Collaboration diagram for player_gripper_geom:
Detailed Description
Request/reply: get geometry.
The geometry (pose, outer size and inner size) of the gripper device can be queried by sending a null PLAYER_GRIPPER_REQ_GET_GEOM request.
Public Attributes | |
| player_pose3d_t | pose |
| Gripper pose, in robot cs (m, m, m, rad, rad, rad). More... | |
| player_bbox3d_t | outer_size |
| Outside dimensions of gripper (m, m, m). More... | |
| player_bbox3d_t | inner_size |
| Inside dimensions of gripper, i.e. More... | |
| uint8_t | num_beams |
| Number of breakbeams the gripper has. | |
| uint8_t | capacity |
| Capacity for storing objects - if 0, then the gripper can't store. | |
Member Data Documentation
◆ inner_size
| player_bbox3d_t player_gripper_geom::inner_size |
Inside dimensions of gripper, i.e.
the size of the space between the fingers when they are fully open (m, m, m)
Referenced by P2OS::ProcessMessage().
◆ outer_size
| player_bbox3d_t player_gripper_geom::outer_size |
Outside dimensions of gripper (m, m, m).
Referenced by P2OS::ProcessMessage().
◆ pose
| player_pose3d_t player_gripper_geom::pose |
Gripper pose, in robot cs (m, m, m, rad, rad, rad).
Referenced by P2OS::ProcessMessage().
The documentation for this struct was generated from the following file:
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13