
Actuator geometry. More...
#include <player_interfaces.h>
Detailed Description
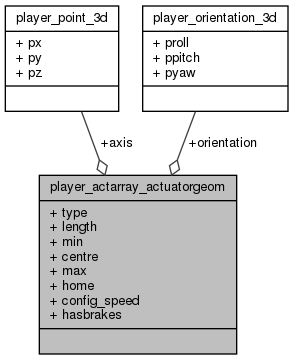
Actuator geometry.
Public Attributes | |
| uint8_t | type |
| The type of the actuator - linear or rotary. More... | |
| float | length |
| The length of this actuator's link to the next actuator. More... | |
| player_orientation_3d_t | orientation |
| The orientation of this actuator when it is in its rest position. More... | |
| player_point_3d_t | axis |
| The axis of rotation for this actuator if it is rotary, or axis along which it moves if it is linear. More... | |
| float | min |
| The range of motion of the actuator, in m or rad depending on the type. More... | |
| float | centre |
| The range of motion of the actuator, in m or rad depending on the type. More... | |
| float | max |
| The range of motion of the actuator, in m or rad depending on the type. More... | |
| float | home |
| The range of motion of the actuator, in m or rad depending on the type. More... | |
| float | config_speed |
| The configured speed setting of the actuator - different from current speed. More... | |
| uint8_t | hasbrakes |
| If the actuator has brakes or not. More... | |
Member Data Documentation
◆ axis
| player_point_3d_t player_actarray_actuatorgeom::axis |
The axis of rotation for this actuator if it is rotary, or axis along which it moves if it is linear.
In both cases, it is a vector.
Referenced by P2OS::ProcessMessage().
◆ centre
| float player_actarray_actuatorgeom::centre |
The range of motion of the actuator, in m or rad depending on the type.
Referenced by P2OS::ProcessMessage().
◆ config_speed
| float player_actarray_actuatorgeom::config_speed |
The configured speed setting of the actuator - different from current speed.
Referenced by P2OS::ProcessMessage().
◆ hasbrakes
| uint8_t player_actarray_actuatorgeom::hasbrakes |
If the actuator has brakes or not.
Referenced by P2OS::ProcessMessage().
◆ home
| float player_actarray_actuatorgeom::home |
The range of motion of the actuator, in m or rad depending on the type.
Referenced by P2OS::ProcessMessage().
◆ length
| float player_actarray_actuatorgeom::length |
The length of this actuator's link to the next actuator.
For linear actuators, this should be its length when at 0 position.
Referenced by P2OS::ProcessMessage().
◆ max
| float player_actarray_actuatorgeom::max |
The range of motion of the actuator, in m or rad depending on the type.
Referenced by P2OS::ProcessMessage().
◆ min
| float player_actarray_actuatorgeom::min |
The range of motion of the actuator, in m or rad depending on the type.
Referenced by P2OS::ProcessMessage().
◆ orientation
| player_orientation_3d_t player_actarray_actuatorgeom::orientation |
The orientation of this actuator when it is in its rest position.
When combined with the length of the actuator's link, this will give the position in space of the next actuator in the array in the coordinate space of this actuator (i.e., it is the direction to the next actuator).
Referenced by P2OS::ProcessMessage().
◆ type
| uint8_t player_actarray_actuatorgeom::type |
The type of the actuator - linear or rotary.
Referenced by P2OS::ProcessMessage().
The documentation for this struct was generated from the following file:
Generated on Wed Sep 2 2020 16:39:29 for Player by
 1.8.13
1.8.13