
player_ranger_geom Struct Reference
#include <player_interfaces.h>
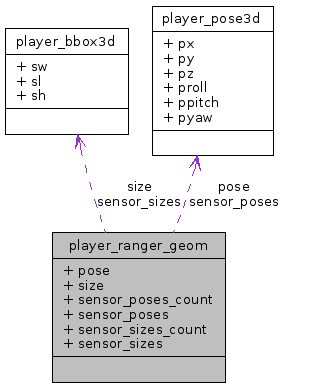
Collaboration diagram for player_ranger_geom:
Detailed Description
Data and Request/reply: Get geometry.The ranger device position, orientation and size.
Definition at line 391 of file player_interfaces.h.
Public Attributes | |
| player_pose3d_t | pose |
| Device centre pose in robot CS [m, m, m, rad, rad, rad]. | |
| player_bbox3d_t | size |
| Size of the device [m, m, m]. | |
| uint32_t | sensor_poses_count |
| Number of individual range sensors that make up the device. | |
| player_pose3d_t * | sensor_poses |
| Pose of each individual range sensor that makes up the device (in device CS). | |
| uint32_t | sensor_sizes_count |
| Number of individual range sensors that make up the device. | |
| player_bbox3d_t * | sensor_sizes |
| Size of each individual range sensor that makes up the device. | |
The documentation for this struct was generated from the following file: